
|
|
|
|
|

|
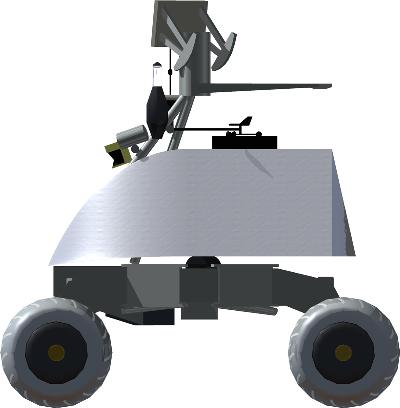
Because traditional cameras provide limited resolution and field of view, Nomad uses a panospheric camera as its primary camera. This camera captures imagery 360 degrees around the robot by combining a camera with a convex optical mirror. The camera is poinetd up into the mirror. Spherical images of a complete horizon provide operators and observers an immersive experience with wider imagery for driving through and viewing planetary terrain.
Even the high data rates from our pointed antenna are about 100 times too slow for all the imagery we need to return. Each image conatins over 12,000,000 bits of information. This imagery is compressed by onboard computers to fit within the available communications bandwidth. After being received in the United States, the imagery is decompressed, processed to eliminate the distortion from the convex optics, and then displayed on a 10 meter wide, 3 meter high curved projection screen at the Science Center. This process happens six times per second. |

|
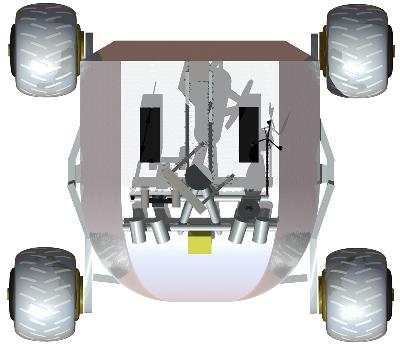
| Because we have two eyes, we can triangulate the distance to objects. Nomad has six eyes, organized as three pairs, to help it do the same thing. By combining this information with the data it receives from the laser range finder, Nomad can sense slopes that are too steep, objects such as boulders, and craters or cliffs. |
| In addition to having six "eyes" that help Nomad to triangulate the distance to objects and possible obsticles, it has a laser range finder which sends out a pulse of laser light and times how long it takes to come back. The longer it takes, the farther away an object is. |
| There are two identical digital weather stations, one on the rover, the other at the Carnegie Science Center. They both give: total rainfall, barometric pressure, inside/outside temperature, wind speed, wind direction, and inside/outside humidity. |

|
Field robots commonly use omnidirectional antennas for communications with
remote control stations. This scheme restricts the bandwith (nominally <1km)
due to the limited power available onboard the robot. However, Nomad uses an
actively pointed high gain antenna to achieve high data rate communication over
extended range.
In a custom design, the antenna pointing device is a balanced mechanism that can steer the antenna at high slew rates up to 60 degrees/s to compensate for vehicle motion. The pointing mechanism orients the onboard antenna towards a stationary receiver antenna at a relay station located 0-10km away. The antenna pointing technology uses an IMU, Differential Global Positioning System (DGPS), compass, inclinometers, and encoder data to generate the necessary position estimates for accurate pointing control. |
| An omnidirectional antenna broadcasts in all directions at once. Because this sends power everywhere, it's range is limited, and can only communicate a small amount of information. It is the robot's main communication for basic tasks. |

|

|
Unique to Nomad, the chassis expands, compacts, and steers by driving two pairsof four-bar mechanisms, one on either side of the robot. This capability not only allows Nomad to adapt its footprint to the terrain but also enables steering by differential actuation of the two deployment motors. The robot's four wheel drive/four wheel steering locomotion and innovative suspension system will provide effective traction, mobility, and propulsion across loose sands, rocks, and soils typical of the Atacama landscape. The "deployed" mode, when the chassis is expanded, improves Nomad's stability and propulsion over variable terrain, facilitates body posture averaging for smooth driving motion. |
| Like all other space rovers, Nomad has metal tires. Space robots can't use rubber tires, since rubber disintegrates in a vacuum. The cleats along the circircumference help Nomad acheive traction in soft soils and along slopes. The motors that drive Nomad are inside the wheels, underneath the axels, to help keep the wieght of the robot as low to the ground as possible. |

|
|
Nomad is equipped with a digital gyro-compass, a global positioning system receiver and an inertial measurement unit from which it can deduce it's position and orientation quickly and accurately. Using this information it can steer it's
onboard directional antenna precisely at a receiving antenna. As Nomad travels
over bumps and rocks, it's antenna stays precisely pointed. This allows us to focus all of our signal in that one direction, making for a stronger signal and higher bandwith.
GPS (Global Positioning System) is based on 24 closely monitored satellites that orbit the earth at 20,000 km. These satellites act as staionary reference points whose locations are always monitored and known. The signal travel time to and from the satellites gives the distance Nomad is from each of the satellites. By knowing the distance from 3 or more of the satelittles Nomad 'knows' where it is. |
| Nomad is equipped with two high resolution color cameras. These cameras can pan and tilt. Researchers will use the cameras to take pitures of the terrain and try to identify and analyze the soil compostion. |
|