 Ben Brown
Ben Brown
Ben Brown
Ben BrownOffice phone: (412) 268-7658
Lab phone: (412) 268-3652
Fax: (412) 268-6436
Email: hbb@cs.cmu.edu
http://www.cs.cmu.edu/~hbb
My research interests are in the areas of design of mechanical and electromechanical
systems in robotics. I am particularly interested in high-performance structures
and mechanisms, elastic and kinetic energy storage, and dynamic stabilization
of wheeled and legged robots. I began my robotics career working with Marc
Raibert's Leg Lab at CMU, and we built some exciting running legged robots.
(The lab has since moved to MIT, but you can still see some of our old robots
on their
website.) Recent projects include the development of a high-precision
(micron resolution) manipulator for the Minifactory
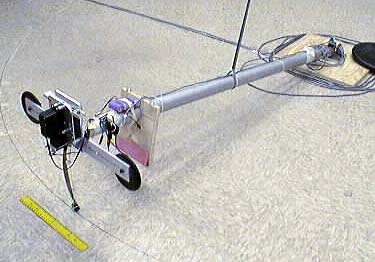
project and a third-generation gyroscopically stabilized wheel
(Gyrover).
Current projects include a highly efficient hopping robot, (Bow Leg
Hopper); the human-scale BowGo
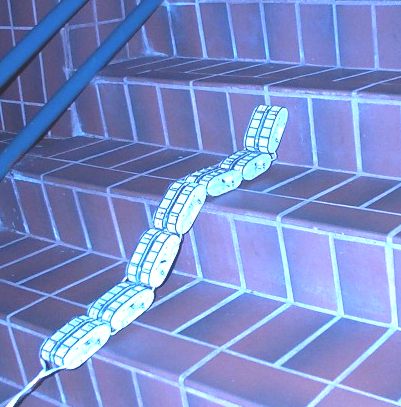
that employs Bow Leg technology; the Millibot Train, and the student Mobot competition. See the Gyrover
on South
Park!
|
|
|

|
|

|
|
4.2 MB Media Player |
|
|
|
|

{kind=link}