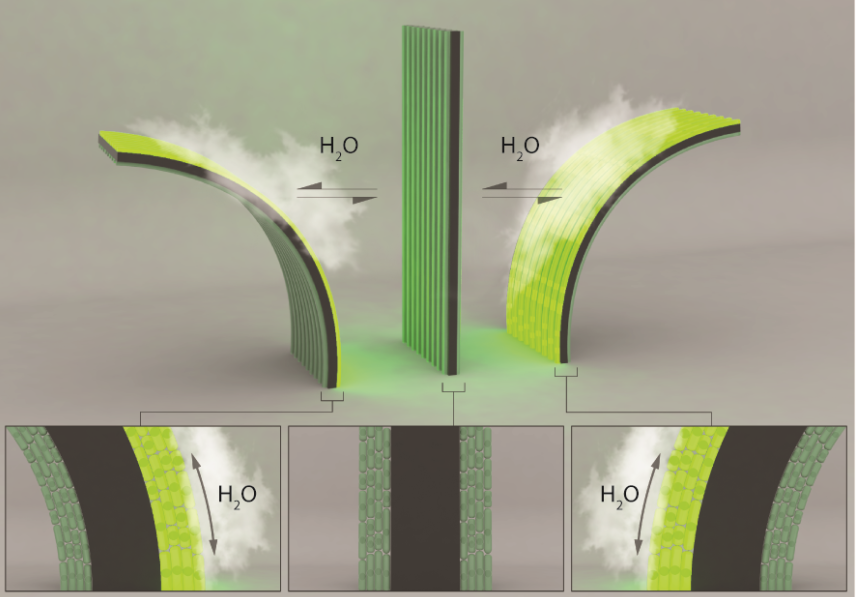
We designed a breathable workout suit with ventilating flaps that open and close in response to an athlete’s body heat and sweat. These flaps, which range from thumbnail- to finger-sized, are lined with live microbial cells that shrink and expand in response to changes in humidity. The cells act as tiny sensors and actuators, driving the flaps to open when an athlete works up a sweat, and pulling them closed when the body has cooled off.

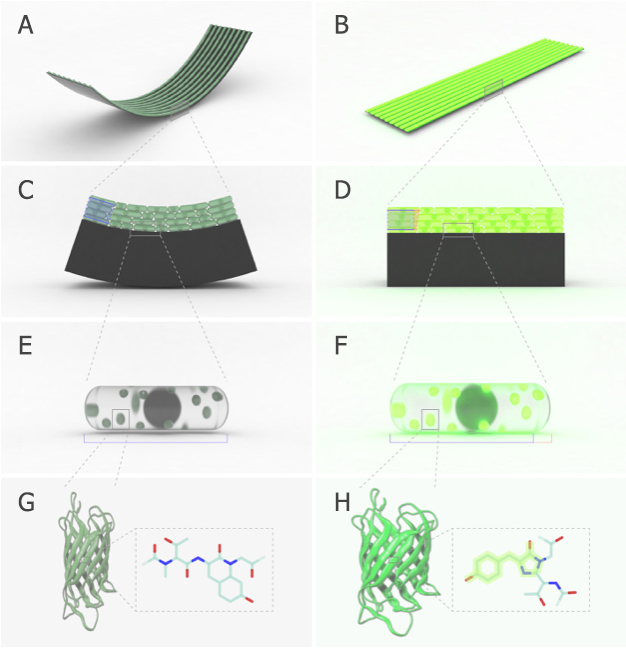
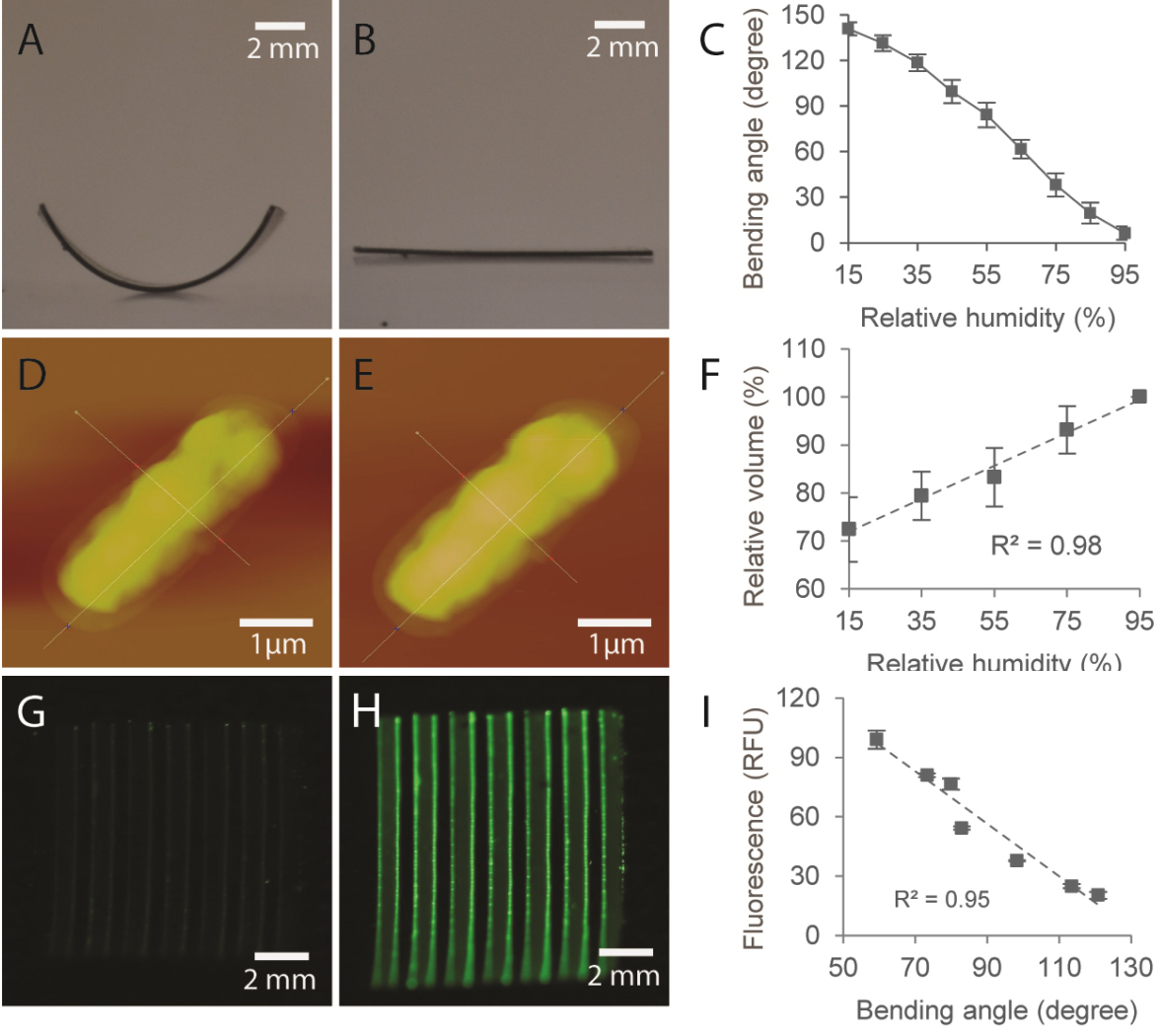
Cells' biomechanical responses to external stimuli have been intensively studied but rarely implemented into devices that interact with human body. Here, we demonstrate that the hygroscopic and biofluorescent behaviors of living cells can be engineered to design bio-hybrid wearable devices, which give multifunctional responsiveness to the sweat of a human body. By depositing genetically-tractable microbes on a humidity-inert material to form a heterogeneous multi-layered structure, we obtained bio-hybrid films that can reversibly change shape and biofluorescence intensity within a few seconds in response to environmental humidity gradients. Experimental characterization and mechanical modelling of the film were performed to guide the design of a wearable running suit and a fluorescent shoe prototype with bio-flaps that dynamically modulates ventilation in synergy with the body's need for cooling.
We use genetically modified living cells as our hygromorphic material units. The genetically modified E. coli cells carries biofluorescence. We quantified the change in fluorescence intensity in response to relative humidity. It transpired that the intensity decreased linearly as the relative humidity increased. A linear relationship between the intensity in fluorescence and the bending angle was also noted.