Simultaneous Localization
and Mapping with
Detection, Tracking and
Classification of Moving Objects
Simultaneous Localization
and Mapping with
Detection, Tracking and
Classification of Moving Objects
| Core Description | ||||||||||||||||||
| Both simultaneous localization and mapping (SLAM) and detection, tracking and classification of moving objects (DTCMO) play key roles in robotics and automation. For certain constrained environments, SLAM and DTCMO are becoming solved problems. But for robots working outdoors, and at high speeds, SLAM and DTCMO are still incomplete. In earlier works, SLAM and DTCMO are treated as two separate problems. In fact, they can be complementary to one another. In this project, we present a new method to integrate SLAM and DTCMO to solve both problems simultaneously for both indoor and outdoor applications. | ||||||||||||||||||
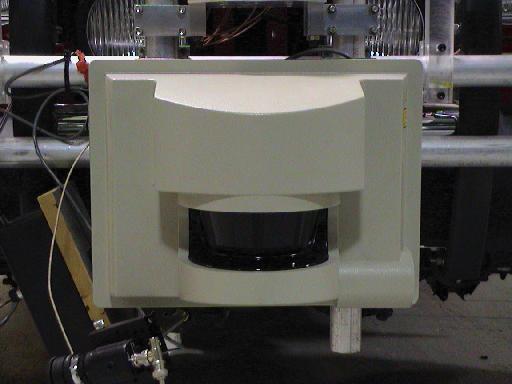
| Sensors and Test Vehicles | ||||||||||||||||||
 --- ---
Navlab8 with SICK PLS 100 and an Omni-Camera
|
||||||||||||||||||
| Simultaneous Localization and Mapping for both indoor and outdoor applications | ||||||||||||||||||
|
||||||||||||||||||
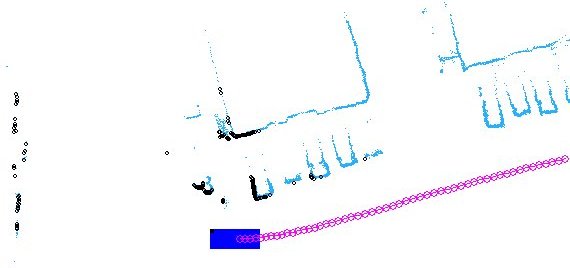
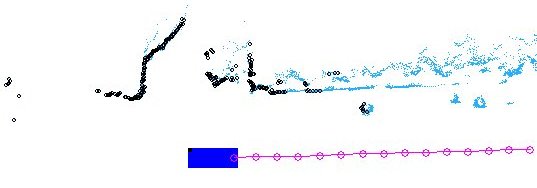
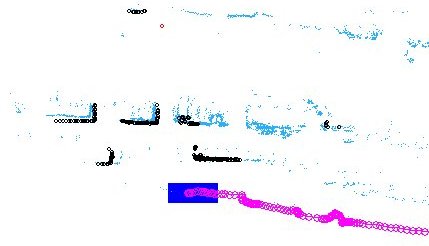
| SLAM with Detection of Moving Objects | ||||||||||||||||||
|
||||||||||||||||||
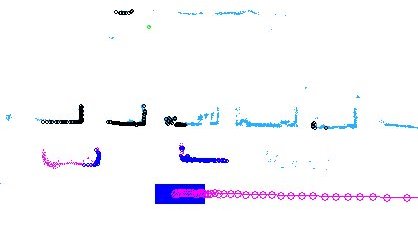
| SLAM with Detection and Tracking of Moving Objects | ||||||||||||||||||
SLAM Only
As it can be seen from figures, SLAM with DTCMO can get rid of moving objects and get a more consist mapping result. |
||||||||||||||||||
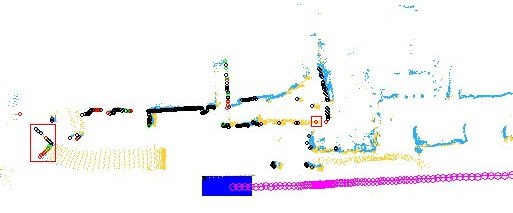
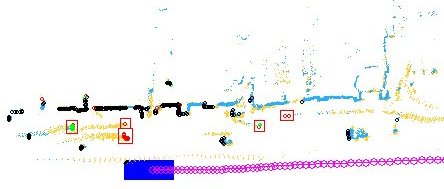
| Global Localization and Intersection Detector | ||||||||||||||||||

Digital Map 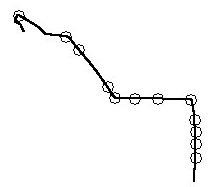
The results of SLAM with DTCMO [We used ONLY range images to get this result.] Since localization errors
are cumulative, we need to develop algorithms that can register the local
localization with the global. We did this by recognizing landmarks in the
environment and correcting the pose of the test vehicle to the known global
positions of the landmarks. Since intersections are a large part of the
urban road infrastructure, an intersection detector would provide many
opportunities for eliminating the cumulative error. The circles in figure
are intersections found by the current intersection detector.
|
||||||||||||||||||
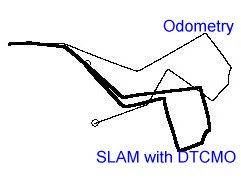
| Odometry vs. SLAM with DTCMO | ||||||||||||||||||
|
||||||||||||||||||
| Publications: | ||||||||||||||||||
| C.-C. Wang and C. Thorpe, "Simultaneous Localization and Mapping with Detection and Tracking of Moving Objects", IEEE ICRA '02, 2002. [PDF 421 KB] | ||||||||||||||||||
| Jump to: | ||||||||||||||||||
 --- --- |
||||||||||||||||||
|
|
 ---
---