
These are our images of our Segway RMP robot soccer team. For details on these robots, the software and algorithms, see our segway web page. Credit for all images goes to the CORAL Research Group, School of Computer Science, Carnegie Mellon University.
Our publications can be found at: The project is funded under the DARPA MARS program. Details on the Segway RMP project can be found at the official DARPA Segway RMP page:03Dec-GUI, 03Dec-LabPhotos, 03Dec-Winter-Riding, 03Nov-Lab-Photos, 03Sep-MARS-Demo,
03Sep-prototype, 04Aug-Outside, 04Feb-HighBay, 04Feb-RMP-P, 04Jan-Robot-Human-Interaction,
.,
|
Some photos of the Segway in the lab during development (approx. Nov, 2003)
 |
 |
 |
 |
 |
On December 5th, 2003 Carnegie Mellon got snowed on. We explored how well the Segway HT, when equipped with Dirtbike tyres, could handle the terrain. These images show the Segway HT in action, as well as an in-the-field battery change.
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
|||
Some photos of the Segway in the lab during development (approx. Nov, 2003)
 |
 |
 |
 |
 |
These pictures were taken from the
DARPA MARS and
DARPA Segway RMP
PI meeting held in Washington DC, during September of 2003. This was the first
demonstration of our autonomous Segway RMP. The demonstration consisted of the robot
chasing the ball around and kicking it. The prototype kicker is shown in some of the pictures
below. Movies from the demonstration are available at
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
|||
These pictures were taken prior to our demo in Washington DC for the DARPA MARS program in September of 2003.
 |
 |
 |
 |
 |
 |
 |
|||
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
|
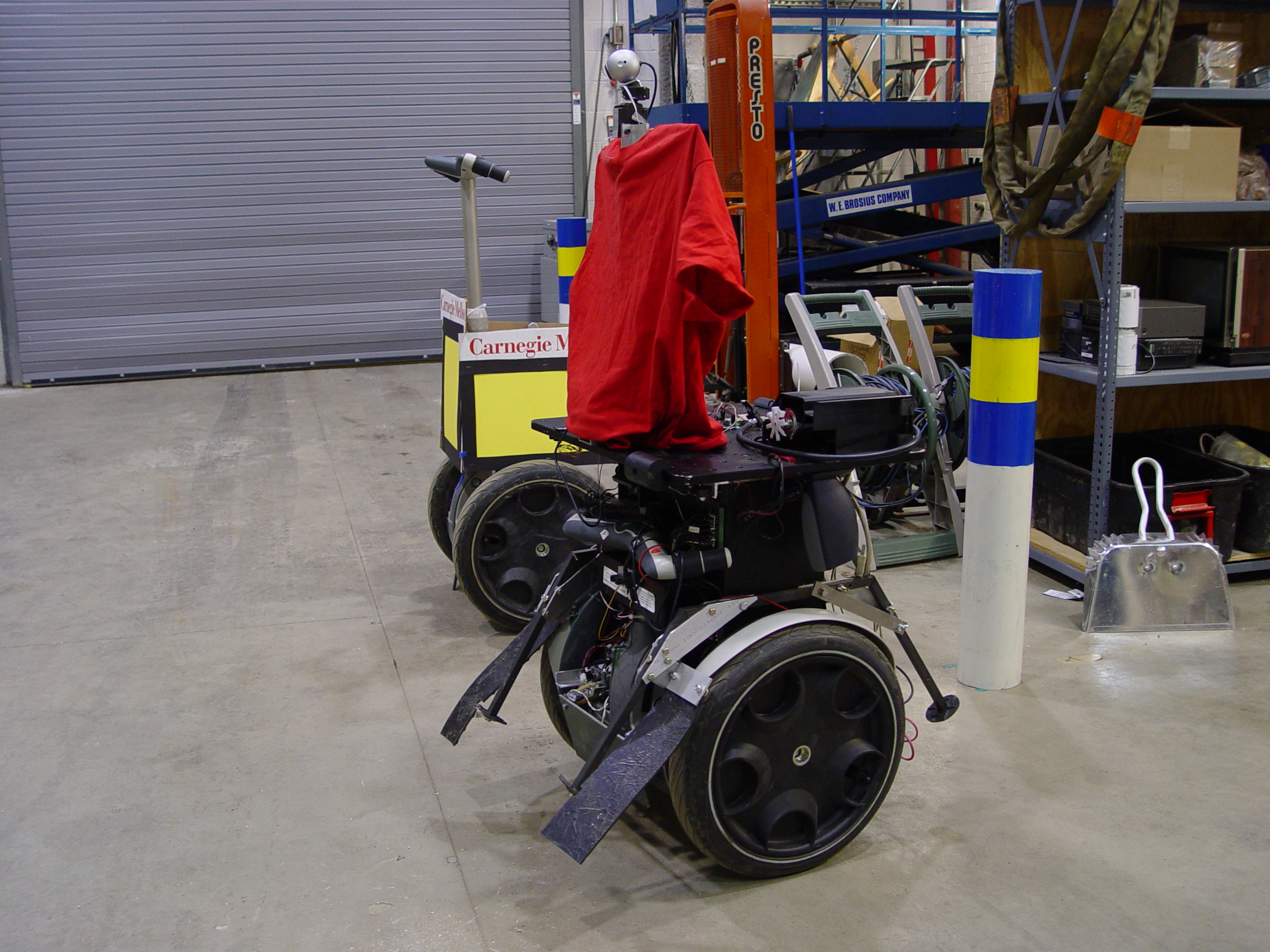
These pictures show one of our robots in the high-bay of Newell Simon Hall during January of 2004. You can see the kicker, and the mounted camera (which has a servo-driven pan-tilt unit). All images credited to CORAL Research Group, Carnegie Mellon University.
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
||
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
|
These images show a human riding a Segway HT p-model with a Segway RMP. We are using the Segway's to study human-robot interaction in team tasks requiring a real-time response. (Credit CORAL Lab, Carnegie Mellon University)
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
|||
These are our images of our Segway RMP robot soccer team. For details on these robots, the software and algorithms, see our segway web page. Credit for all images goes to the CORAL Research Group, School of Computer Science, Carnegie Mellon University.
Our publications can be found at: The project is funded under the DARPA MARS program. Details on the Segway RMP project can be found at the official DARPA Segway RMP page: |
Email the Web Administrator
for any difficulties
File generated on Tue Oct 5 11:46:25 2004