
This photo shows the 2D prototype in the lab (now disassembled). It is a planar machine; the boom is mounted on a pivot and constrains the machine to the surface of a sphere. The machine is also free to rotate on its pitch axis.
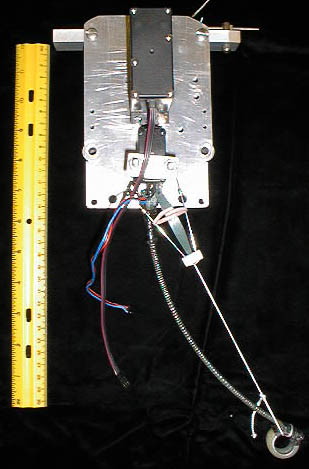
This photo shows the prototype removed from the boom. Clearly visible is the slender fiberglass leg, the bow-string running from the toe into the body, and the two hobby servomotors that power the machine. One motor positions the leg and the other tensions the leg by pulling on the bow string.
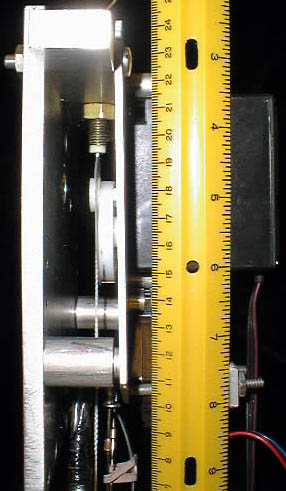
This photo shows the body of the machine from the side. The thrust mechanism consists of the bow-string and a pulley mounted on a disc that is driven by the thrust motor (partially obscured). The disc and pulley are seen edge-on; they are adjacent to and behind the string.