3D Reconstruction of a Moving Point from a Series of 2D Projections
Hyun Soo Park1, Takaaki Shiratori1,2, Iain Matthews2, and Yaser Sheikh1
1Carnegie Mellon University, 5000 Forbes Ave., Pittsburgh, PA, USA, 15213
2Disney Research, Pittsburgh, 4615 Forbes Ave., Pittsburgh, PA, USA, 15213
Abstract
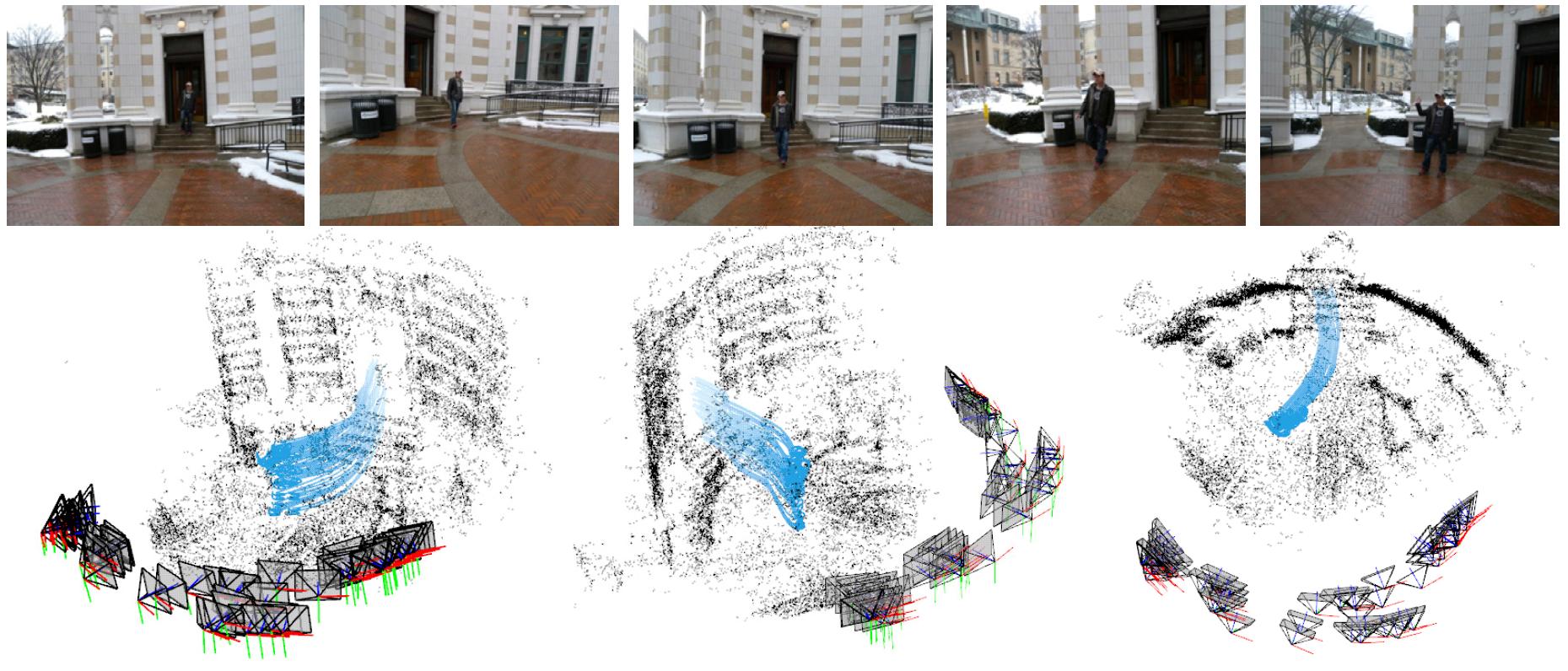
This paper presents a linear solution for reconstructing the 3D trajectory of a moving point from its correspondence in a collection of 2D perspective images, given the 3D spatial pose and time of capture of the cameras that produced each image. Triangulation-based solutions do not apply, as multiple views of the point may not exist at each instant in time. A geometric analysis of the problem is presented and a criterion, called reconstructibility, is defined to precisely characterize the cases when reconstruction is possible, and how accurate it can be. We apply the linear reconstruction algorithm to reconstruct the time evolving 3D structure of several real-world scenes, given a collection of non-coincidental 2D images.
Paper
Hyun Soo Park, Takaaki Shiratori, Iain Matthews, Yaser Sheikh "3D Reconstruction of a Moving Point from a Series of 2D Projections" European Conference on Computer Vision (ECCV) (oral), Sep., 2010, [PDF, bib]
Video
video download (14.5 MB)Presentation
Code and data
Matlab code (5.61 KB)
Motion capture (stand, faint, and walk) (314 KB)
Real scene (Rock climbing, Dance, Hand wave, Meeting, and Speech)(180 KB)
Images: Rock climbing(131 MB), Dance (62 MB), Hand wave (80 MB), Meeting (41 MB), Speech (84 MB)
Terms of usage
The code is supplied with no warranty and Carnegie Mellon or the authors will not be held responsible for the correctness of the code.
The code of the software will not be transferred to outside parties without the authors' permission and will be used only for research purposes. In particular, the code will not be included as part of any commercial software package or product of this institution.
Acknowledgements
NSF grant IIS-0916272