Quadratic Encoding of
Optimized Humanoid Walking
Optimized Humanoid Walking
People
Abstract
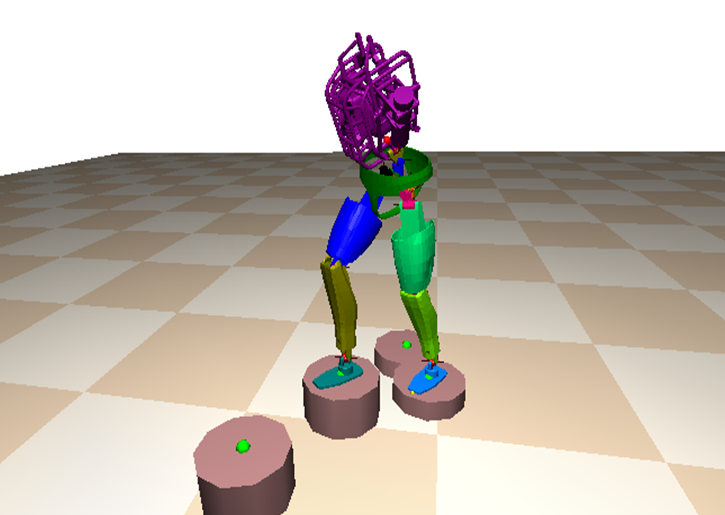
In this paper we show that optimal stepping trajectories and trajectory cost for a walking biped robot on rough terrain can be encoded as simple quadratic functions of initial state and footstep sequence. In order to find this encoding, we build a database of optimal walking trajectories for a 3D humanoid model by sampling the input space (initial state and footstep sequence) and solving a physically-based trajectory optimization problem for each sample. Then, the function coefficients are obtained by fitting the data using least squares. The performance of the proposed method is evaluated by comparing the function values with other optimal walking motion data generated with different footstep samples. As an application, we use a quadratic function to calculate the effort cost used in finding an optimal footstep sequence with an A* algorithm. Our study shows that a simple function can encode optimal walking effectively, which provides a fast alternative to online optimization of walking with full body dynamics.
Citation
Junggon Kim, Nancy S. Pollard and Christopher G. Atkeson, "Quadratic encoding of optimized humanoid walking," IEEE-RAS International Conference on Humanoid Robots (Humanoids), 2013.
Links
Copyright notice
The documents contained in these directories are included by the contributing authors as a means to ensure timely dissemination of scholarly and technical work on a non-commercial basis. Copyright and all rights therein are maintained by the authors or by other copyright holders, notwithstanding that they have offered their works here electronically. It is understood that all persons copying this information will adhere to the terms and constraints invoked by each author's copyright. These works may not be reposted without the explicit permission of the copyright holder.
|
|
Comments, questions to Junggon Kim. We support web standards; this page is valid XHTML 1.0 Transitional and CSS.