Research Description
I am a second year Ph.D. Candidate in Robotics. My advisor is Prof.
Steve Seitz. My research interests include: Computer Graphics, Computer
Vision, Image and Video Processing, User Interfaces, and Multimedia Communications.
Automatic Image-Based Modeling
Abstract
This paper presents a novel approach for constructing multiresolution
surface models from a set of calibrated images. The output is a texture-mapped
triangular surface mesh that best matches all the input images. The mesh
is obtained by deforming a generic initial mesh such as a sphere or cube
according to image and geometry-based forces. This technique has the following
key features: (1) the initial mesh is able to converge to the object surface
from arbitrarily far away, (2) the resolution of the final mesh adapts
to the local complexity of the object, (3) sharp corners and edges of object
surface are preserved in the final mesh, (4) occlusion is correctly modeled
during convergence, (5) re-projection error of the final mesh is optimized,
(6) the output is ideally suited for rendering by existing graphics hardware.
The approach is shown to yield good results on real image sequences.
Results
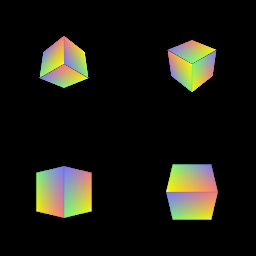
The top left shows 4 of 26 synthetic images used to model a texture-mapped
cube, the top right shows 4 images of the reconstructed texture-mapped cube from novel viewpoints, the wireframes in different stages of deformation from a sphere to a cube are at the bottom.
The top left shows 4 of 11 real images used to model a toy dinosaur, the top right shows 2 images of the reconstructed dinosaur from novel viewpoints, the wireframes in different stages of deformation from a sphere to a dinosaur are at the bottom.
Paper
Li Zhang, Steven M. Seitz, Image-Based Multiresolution Modeling by Surface
Deformation, CMU-RI-TR-00-07, Robotics Institute, Carnegie Mellon University, March, 2000. ( ps.zip 3.0M available upon request )
return to Li Zhang's homepage