Some wisdom on modeling: you don't have to include all factors in your model. Friction is especially tricky. Some people could have benefited by dropping friction terms. This is the reason it is recommended to estimate model parameters using data collected from motions similar to those you will be driving with your model. You are doomed to fit your data to the wrong model structure, so make sure that the parameters you find make the model behave similarly to the real world in situations you will actually be using it. Most people picked a model structure, stuffed all of their data into a big matrix, and did a single optimization to estimate all of the parameters, without doing any reasoning about what the parameters mean. There are different approaches available.
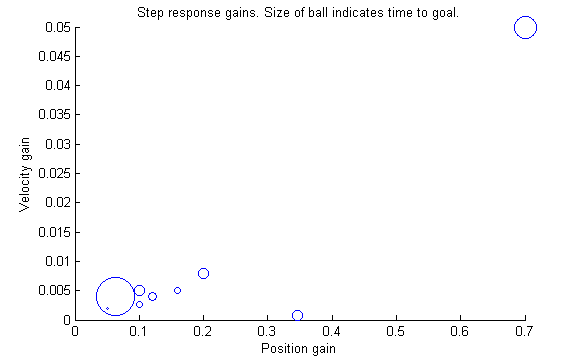
You got a range of answers to the step response gains. The following scatter plot suggests a linear relationship between proportional and damping gains. The smaller the circle, the shorter the estimated time to reach the goal. Reported times ranged from approximately 0.25 seconds to 0.3 seconds. The outlier is 0.5 seconds.