16-735 Homework 7
Michael Dille
11/26/2007
1. Implement a PRM planner for a multi-link (at least four) robot arm.
The PRM variant I implemented for this assignment is the RRT. I chose
this over the traditional PRM because RRTs seem to be what's used in
practice lately and are something that I wanted more experience with.
This proved to be a fruitful experience because though the algorithm is
remarkably simple, there are subtleties to making it work well.
I implemented the RRT planner for a multi-link arm in 2-D.
Below are examples for a 4-link and 8-link arm. The world is centered
at the fixed base of the arm and includes arbitrary polygonal
obstacles.
The algorithm proceeds roughly as follows:
- Create an explicit search tree comprised of the singleton start state.
- While !s.isReachable(goalstate) for all s in tree:
- s_rand = generate_random_config
- s_nearest = find_nearest(s_rand)
- if (s_new = expand_tree(s_nearest, s_rand)) != NULL:
- add_child(s_nearest, s_new)
Component explanation:
- States. A state is comprised of a robot configuration, in the form of a tuple of joint angles, one for each joint of the arm.
- s1.isReachable(s2). This is a function that returns true iff
s2 can be reached from s1 by merely linearly interpolating the joint
angles between each without any part of the arm intersecting an
obstacle along the way. This test is performed by sampling the line of
configurations between the two at a resolution that is adapted to be
proportional to the speed of the end-effector during the trajectory.
- generate_random_config. This function returns a robot
configuration with joint angles each independently uniformly sampled
from (-Pi,Pi]. A goal bias is introduced here so that 20% of the time,
the goal state is returned instead of an actual random configuration.
This is to bias the search towards the location of the goal.
- find_nearest(s). This function returns the node in the
search tree ``nearest'' the state s. I experimented with two metrics
for this purpose: euclidean distance between end-effector positions
(orientation disregarded) and sum-of-squares difference (around the
unit circle) in the joint angle vectors. Both appeared to work about as
well as the other. For this assignment, I implemented this naively by
exhaustively comparing against every node in the existing tree. This
slowed the planner significantly and should be replaced by a fancier
data structure such as a KD tree.
- expand_tree(s1, s2). This function attempts to expand the
search tree by returning a new state that lies on the linear spline
between s1 (a node already in the search tree) and s2 (a node outside
the search tree). This is performed by progressively sampling along
this line (again with adaptive resolution) and stopping when either an
obstacle is hit or s2 is reached. The state at that point is returned.
- add_child(s1, s2). This function inserts s2 into the search tree -- of which s1 is already a member -- as a child of s1.
Once this loop representing the search is complete, there exists a
state s in the search tree such that s.isReachable(goalstate) returns
true. By following back-pointers up to the start state, the sequence of
states (between each of which linear interpolation of the joint angles
may be used without striking an obstacle) from the start state to this
state s may be found. Linear interpolation may again be applied to
derive a safe trajectory from s to the goal. (This is the reason that
the goal configuration is not shown in the ``configurations searched''
images in the below examples -- one of the configurations shown therein
had line of sight to the goal.)
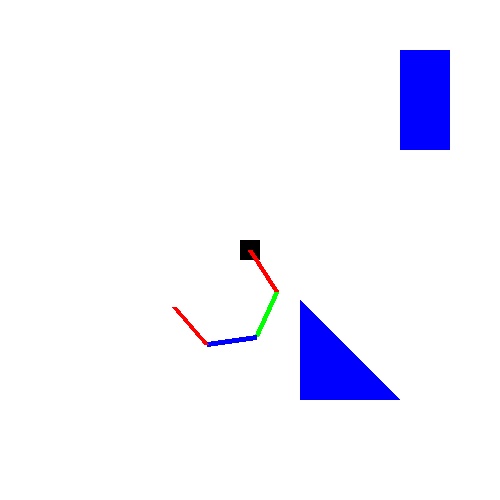
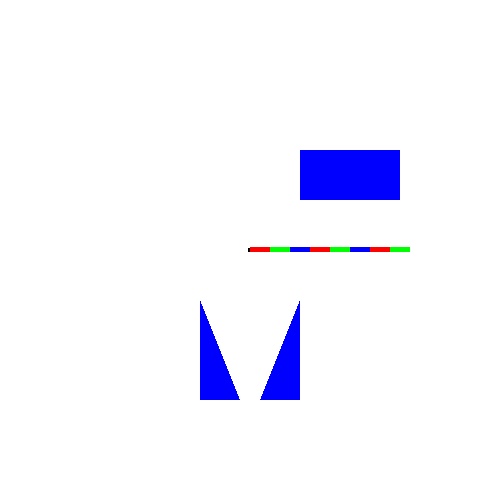
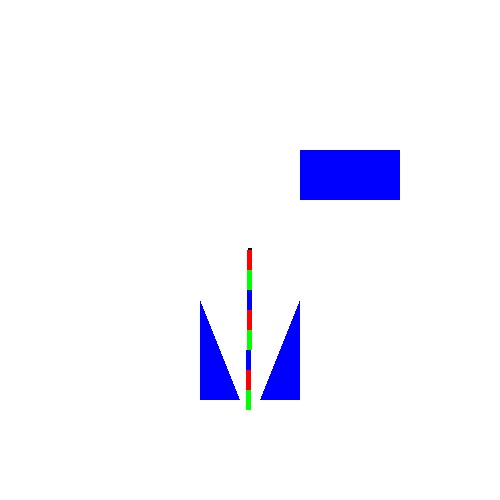
Examples
Initial configuration:

Configurations searched:
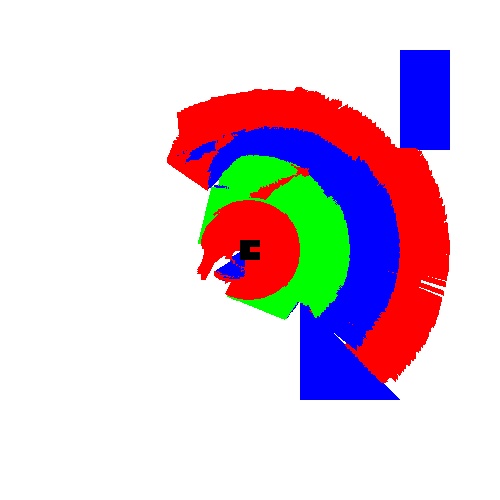
Final configuration:
Initial configuration:
Configurations searched:

Final configuration:
Videos:
Available here
Source code:
Available here
This appears to compile and run fine on linux.andrew.cmu.edu,
and should do the same on most other Linux systems. No attempt was made
to target other OSes.