(Same image in embedded postscript format)
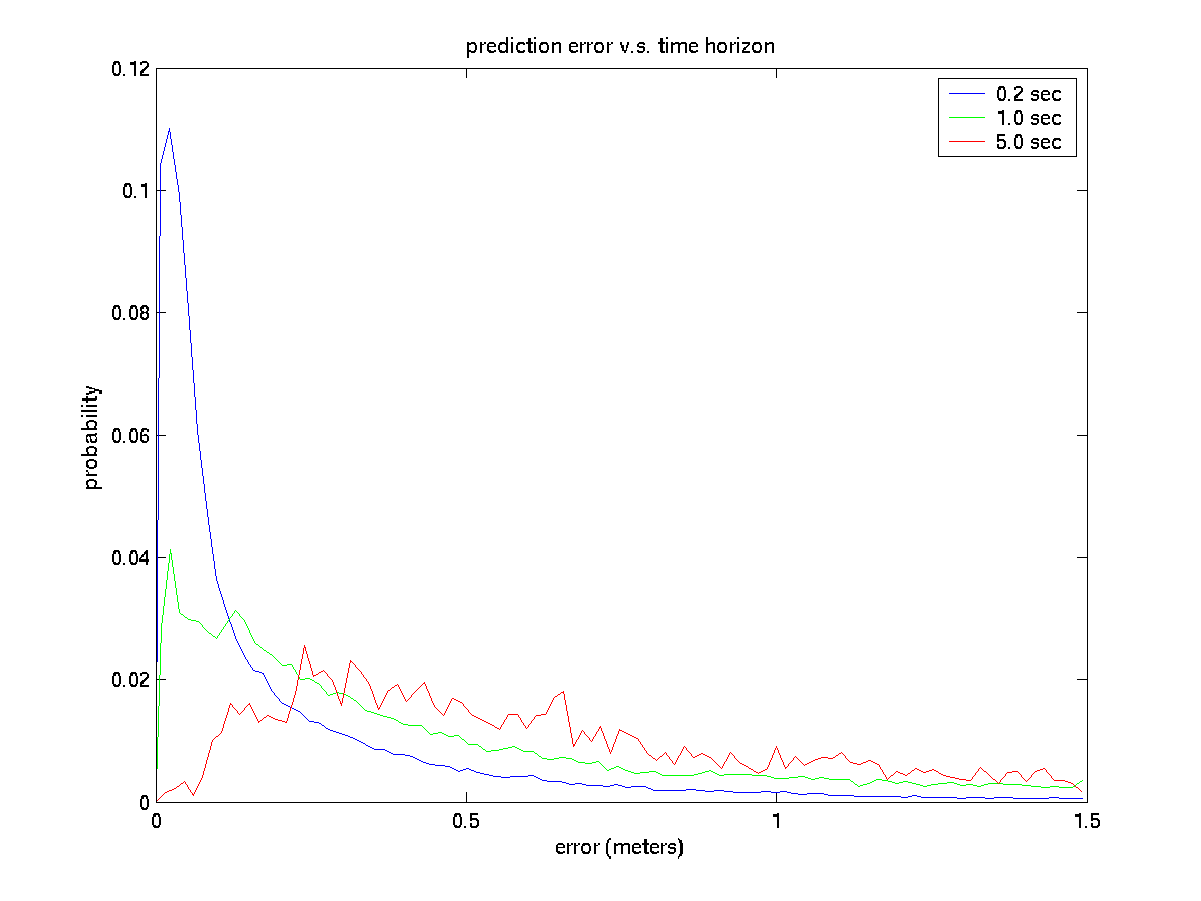
To do this measurement, we use the linear features extracted from the raw scan at the future time and find the RMS distance between the predicted feature position and the measured one. Unfortunately, over the longer time horizons the features may not correspond that well. The tracker itself has considerable internal mechanism to suppress the effects of bad feature correspondences, but this simple validation procedure does not. Hence I believe that the large prediction errors are probably more due to a failure of this validation procedure, rather than actual prediction error.
Be that as it may, in this next plot, we can see the expected
pattern
where prediction error degrades with time horizon. This plot suggests
that prediction is good at 1 second, but dicey at 5 seconds. As noted
above, true preformance may be somewhat better, but this does roughly
correspond with other estimations that e.g. Christoph has done of
vehicle motion predictability.
(Same image in embedded
postscript
format)
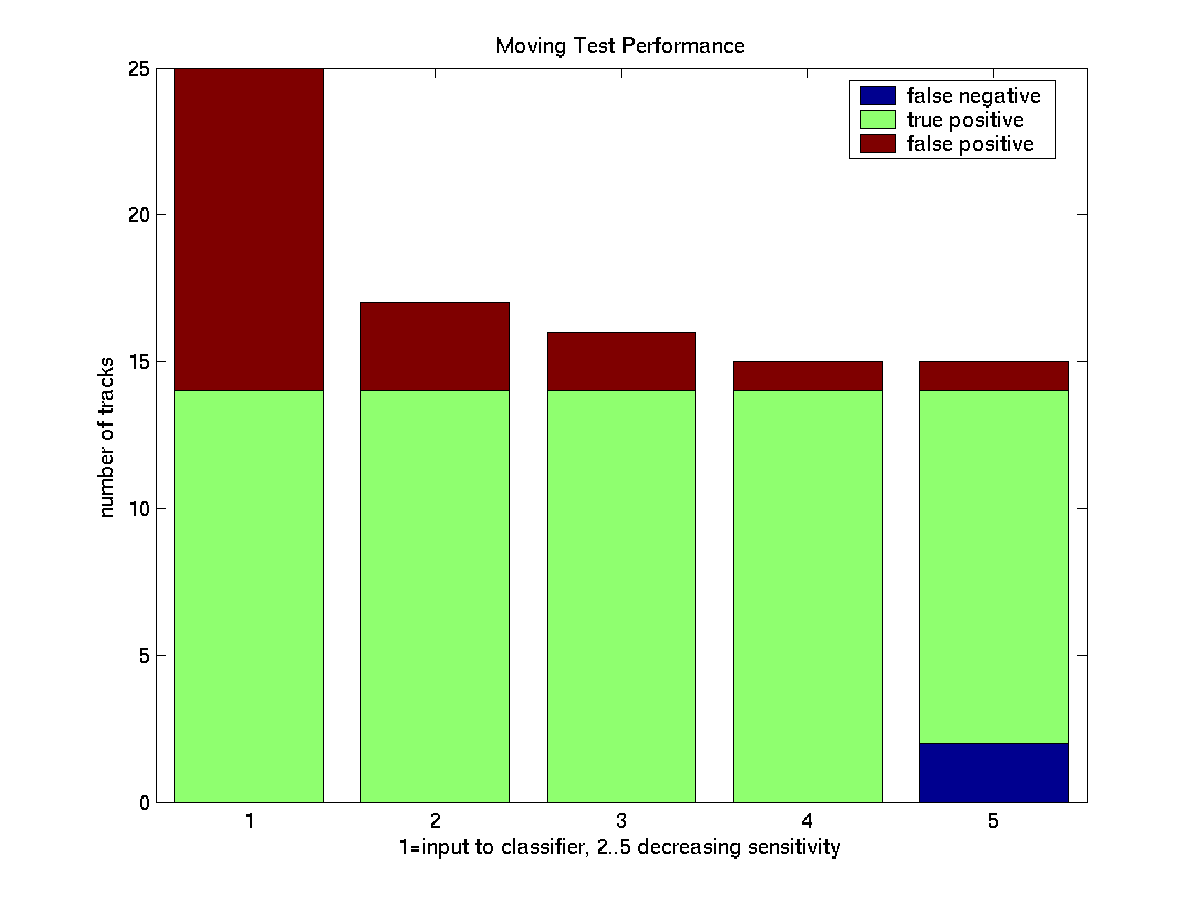
Subjectively, this test seemed quite effective in reducing false positive motion reports. To evaluate this, I looked at a minute of data with numerous people and vehicles in it. I then looked at all of the tracks that were identified as moving prior to the history-based moving test and classified them as truly moving if they corresponded to a car or person that appeared to be moving, and false positive if they corresponded to some other object. This is classification is shown in bar 1.
I then turned on the moving test, using several different sets of sensitivity parameters. In condition 2 we are most willing to believe that tracks are moving, in 5 least willing. The blue or "false negative" are tracks that were correctly identified as moving at higher sensitivity settings, but at the lowest sensitivity are marked non-moving.
In this graph, clearly the incidence of false positive motion reports is greatly reduced, and at moderate parameter settings good results can be acheived with minimal increase in false negatives.
This evaluation procedure does not measure all false negatives, only those that introduced by the history-based moving test. The history motion test is only applied to tracks that have: