The UMass ASCENDER System
Robert T. Collins, Edward M. Riseman, Allen R. Hanson, Howard Schultz,
Christopher O. Jaynes, Frank Stolle, Xiaoguang Wang, Yong-Qing Cheng
The UMass Ascender system has been designed
to automatically populate a site model
with buildings extracted from multiple,
overlapping images taken from a variety of
viewpoints and at different times of day.
Automated construction and management of 3D geometric site
models enables efficient exploitation of the tremendous
volume of information collected daily by national sensors.
Civilian benefits of this technology are also numerous, including
automated cartography, land-use surveying and urban planning.
Some sample building models automatically generated
by the Ascender system are shown below.



Ascender's design philosophy incorporates several key ideas.
First, 3D building reconstruction
is based on geometric features that remain stable under a
wide range of viewing and lighting conditions.
Second, rigorous photogrammetric camera models
are used to describe the relationship between pixels in an image
and 3D locations in the scene, so that diverse sensor characteristics
and viewpoints can be effectively exploited. Third, information
is fused across multiple images for increased accuracy and reliability.
Finally, known geometric constraints are applied whenever
possible to increase the efficiency and reliability
of the reconstruction process.
Ascender Version 1.0
In April 1995, Version 1.0 of the Ascender
system was delivered to Lockheed-Martin for testing on
classified imagery and for integration into the
RADIUS Testbed System.
At the same time, an informal transfer
was made to the National Exploitation Laboratory (NEL)
for familiarization and additional testing.
Version 1.0 extracts flat-roofed rectilinear building
models by applying the following algorithmic steps:
- extraction of 2D straight line segments
- perceptual line grouping into 2D roof hypotheses
- multi-image epipolar rooftop edge matching
- constrained multi-image triangulation of 3D roof polygons
- extrusion to produce a 3D wireframe building model
- multi-image arbitration of competing building hypotheses
Current Work on Ascender
UMass is currently developing more general
building extraction strategies that combine
a wider range of 2D and 3D information to
reliably extract many common building types,
including multi-level flat roofs, peaked-roof
buildings, curved-roof Quonset huts or hangars,
and buildings with complex roof structures
containing gables, slanted dormers or spires.
One building detection extension that has
proven very effective is to directly fuse 2D rooftop
polygon hypotheses with high-resolution Digital Elevation
Map (DEM) data in order to estimate various classes
of parametrically modeled 3D rooftop surfaces.
The DEM data can be produced from a pair of
overlapping images by area-based correlation
matching along epipolar lines, or can be gathered
from IFSAR sensors.
Pixels within each detected roof polygon are backprojected
onto the DEM data to determine a set of sampled 3D points,
to which a parametric surface is fit using robust statistical
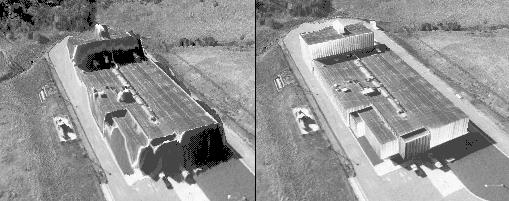
estimation techniques. A sample DEM before and after
refinement via parametric surface fitting is shown below.
Publications
Click here to access recent UMass RADIUS publications.
Related Links