|
|
Robotics Institute Seminar,
February 10, 2006
Time and Place | Seminar Abstract | Speaker Biography | Speaker Appointments
 Exploring the Deepest Depths: Development
of a Hybrid Remotely Operated Vehicle for Oceanographic Operations to 11,000m
Depth
Exploring the Deepest Depths: Development
of a Hybrid Remotely Operated Vehicle for Oceanographic Operations to 11,000m
Depth
Louis Whitcomb
Department of Mechanical
Engineering
Adjunct Scientist
Woods Hole Oceanographic Institution
Mauldin
Auditorium (NSH 1305)
Refreshments 3:15 pm
Talk 3:30 pm
|
Abstract |
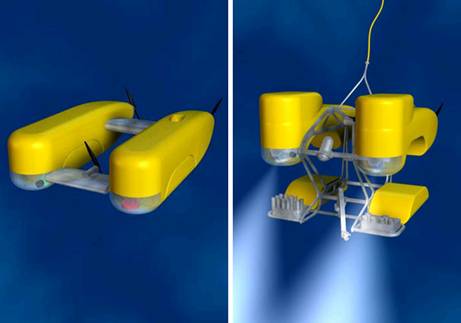
This talk reports an effort at the
Woods Hole Oceanographic Institution (WHOI) to develop an operational
underwater vehicle capable of performing scientific survey and sampling to the
full depth of the ocean (11,000 meters). The project leadership team includes the
speaker, WHOI’s Dr. Dana Yoerger and Andrew Bowen, and researchers from
the U.S. Navy’s Space and Naval Warfare Systems Command. The vehicle,
called a hybrid remotely operated vehicle (HROV), will operate in two different
modes. For broad area survey, the vehicle will operate untethered as an
autonomous underwater vehicle (AUV) capable of exploring and mapping the
seafloor with sonars and cameras. For
sampling and intervention, the vehicle will operate as a tethered remotely
operated vehicle (ROV). The ROV configuration will incorporate a lightweight
fiber optic tether to the surface for high bandwidth real-time video and data
telemetry to the surface to enable high-quality teleoperation, additional
cameras and lights, a manipulator arm, and sampling gear. This talk outlines the scientific motivation
for the project and feasibility of our design concept. An overall vehicle design is also presented,
including pressure housings and buoyancy materials.
The
HROV project is supported by the National Science Foundation, the U.S. Navy
Office of Naval Research, and the National Oceanic and Atmospheric
Administration.
|
Speaker Biography |
Louis L. Whitcomb completed a B.S. in Mechanical Engineering
in 1984 and a Ph.D. in Electrical Engineering in 1992, both at
|
Speaker Appointments |
For appointments, please contact Stephanie Matvey (smatvey@cs.cmu.edu).
The Robotics Institute is part of the School of Computer Science, Carnegie Mellon University.