Approximate Policy Transfer applied to Simulated Bongo Board Balance
Anderson, S.O, Hodgins J.K., Atkeson, C.G.
Developing global policies for humanoid robots using dynamic programming is difficult because they have many degrees of freedom. We present a formalism whereby a value function for a humanoid robot can be approximated using the known value functions of similar systems. These similar systems can include approximate models of the robot with reduced dimensionality or trajectories derived from human motion capture data. Once an approximate value function is known, a local controller is used to compute control signals. The approximate value function provides information about the global strategies that should be used to solve the task. The local controller provides complementary information about the robot's dynamics. We present an implementation of this strategy and simulation results generated by this implementation.
@inproceedings{Anderson:200:apprx,
author = "Anderson, S.O and Hodgins J.K. and Atkeson, C.G."
title = "Approximate Policy Transfer applied to Simulated Bongo Board Balance",
booktitle = "IEEE Humanoids",
month = "November",
year = "2007",
pages = ""
}
Identifying Trajectory Classes in Dynamic Tasks
Anderson, S.O., Srinivasa, S.
Using domain knowledge to decompose difficult control problems is a widely used technique in robotics. Previous work has automated the process of identifying some qualitative behaviors of a system, finding a decomposition of the system based on that behavior, and constructing a control policy based on that decomposition. We introduce a novel method for automatically finding decompositions of a task based on observing the behavior of a preexisting controller. Unlike previous work, these decompositions define reparameterizations of the state space that can permit simplified control of the system.
@inproceedings{Anderson_2007_5606,
author = "Anderson, S.O. and Srinivasa, S.",
title = "Identifying Trajectory Classes in Dynamic Tasks",
booktitle = "International Symposium on Approximate Dynamic Programming and Reinforcement Learning",
month = "April",
year = "2007"
}
Powered bipeds based on passive dynamic principles
Stuart Anderson, Martijn Wisse, Chris Atkeson, Jessica K Hodgins, Garth Zeglin, B. Moyer
We describe three bipedal robots that are designed and controlled based on principles learned from the gaits of passive dynamic walking robots. This paper explains the common control structure and design procedure used to determine the mechanical and control parameters of each robot. We present this work in the context of three robots: Denise, the Delft pneumatic biped, R1, a highly backdrivable electric biped, and R2, a hydraulic biped. This work illustrates the application of passive dynamic principles to powered systems with significant control authority.
@inproceedings{Anderson_2005_5600,
author = "Stuart Anderson and Martijn Wisse and Chris Atkeson and Jessica K Hodgins and Garth Zeglin and B. Moyer",
title = "Powered bipeds based on passive dynamic principles",
booktitle = "5th IEEE-RAS International Conference on Humanoid Robots",
month = "December",
year = "2005",
pages = "110 - 116"
}
Coordinating Feet in Bipedal Balance
S.O. Anderson, C.G. Atkeson, J.K. Hodgins
Biomechanical models of human standing balance in the sagittal plane typically treat the two ankle joints as a single degree of freedom. They describe the sum of the torques produced by the ankles, but do not predict what the contribution of each ankle will be. Similarly, balance algorithms for bipedal robots control the location of the overall center of pressure, but do not consider the individual centers of pressure under each foot. We present theoretical and experimental results showing an optimal solution to the problem of producing a single desired torque with redundant actuators, resulting in alignment of the individual centers of pressure under each foot. This produces a feedback gain structure not addressed in the biomechanics literature and a balance controller that is potentially more robust to unexpected changes in the region of support. We show that the feedback gain matrix of this controller has an unexpected structure — large off-axis integral gain elements indicate that the ankle torque that equalize the position of the center of pressure is determined primarily by information from the other foot. We also demonstrate controllers based on this design using the Sarcos Primus hydraulic biped.
@inproceedings{Anderson_2006_1,
author = "S.O. Anderson and C.G. Atkeson and J.K. Hodgins"
title = "Coordinating Feet in Bipedal Balance",
booktitle = "6th IEEE-RAS International Conference on Humanoid Robots",
month = "November",
year = "2006",
pages = "624 - 628"
}
Ankle springs instead of arc-shaped feet for passive dynamic walking
Wisse, M., Hobbelen, D.G.E, Rottevell, R.J.J, Anderson, S.O., Zeglin, G.J.
Passive dynamic walking is interesting for humanoid robots because of the efficient, natural-looking, and naturally stable gait. However, most prototypes so far have been equipped with arc-shaped feet rigidly mounted to the shank, which has been deemed ‘non-human’, and it prevents certain functions such as standing still. In this paper, we show that the rigid arc feet can be replaced by flat feet that are mounted on ankles with a torsional spring stiffness. The spring stiffness has a similar effect as the foot radius; it reduces the sensitivity to disturbances and thus improves the disturbance handling. We have already implemented the idea in various prototypes, but in this paper we focus on the disturbance behavior of a simple 2D straight-legged passive walking model.
@inproceedings{Wisse_2006_1,
author = "Wisse, M. and Hobbelen, D.G.E and Rottevell, R.J.J and Anderson, S.O. and Zeglin, G.J."
title = "Ankle springs instead of arc-shaped feet for passive dynamic walking"
booktitle = "6th IEEE-RAS International Conference on Humanoid Robots",
month = "November",
year = "2006",
pages = "110 - 116"
}
Sensory Adaptation in Human Balance Control: Lessons for Biomimetic Robotic Bipeds
Anderson, S.O, Atkeson, C.G., Hodgins J.K., Mahboobin, A., Laughlin, P.J., Redfern, M.S.
This paper describes some of the mechanisms used by humans to stand on moving platforms such as a moving bus or ship, and combine body orientation and motion information from multiple sensory sources including the visual, vestibular, and proprioceptive systems. A simple mechanism, sensory re-weighting, has been proposed to explain how human subjects learn to reduce the effects of a moving support platform on perturbing balance. Our goal is to replicate this robust balance behavior in bipedal robots. We present preliminary results exploring sensory re-weighting in humans, simulation, and in a robot implementation.
@inproceedings{Anderson_2007_1,
author = "Anderson, S.O and Atkeson, C.G. and Hodgins J.K. and Mahboobin, A. and Laughlin, P.J. and Redfern, M.S."
title = "Sensory Adaptation in Human Balance Control: Lessons for Biomimetic Robotic Bipeds"
booktitle = "Unpublished",
month = "",
year = "",
pages = ""
}
Maintaining line of sight communications networks between planetary rovers
S.O. Anderson, Simmons, R., Goldberg, D.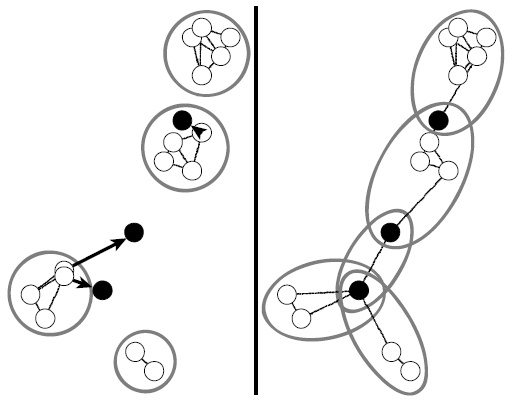
We present an algorithm designed to solve the problem of maintaining communications within a group of robotic explorers. The rovers we consider are equipped with communication hardware that is effective only over a limited range and requires direct line of sight to function. The paper presents the algorithm used to solve this problem and some details of our implementation. We also present the results of an experimental analysis of the algorithm's performance characteristics in a simulated multi-rover environment.
@inproceedings{Anderson_2003_1,
author = "S.O. Anderson and Simmons, R. and Goldberg, D.",
title = "Maintaining line of sight communications networks between planetary rovers",
booktitle = "Intelligent Robots and Systems, 2003. (IROS 2003). Proceedings. 2003 IEEE/RSJ International Conference on",
month = "October",
year = "2003",
pages = "2266 - 2272 vol.3"
}