
Closed-Loop Needle Steering with Duty-Cycling
Mariana C. Bernardes1,2, Bruno V. Adorno3, Philippe Poignet2, Geovany A. Borges1
1 LARA, Universidade de Brasília
2 LIRMM, Université Montpellier 2
3 Universidade Federal de Minas Gerais
Abstract
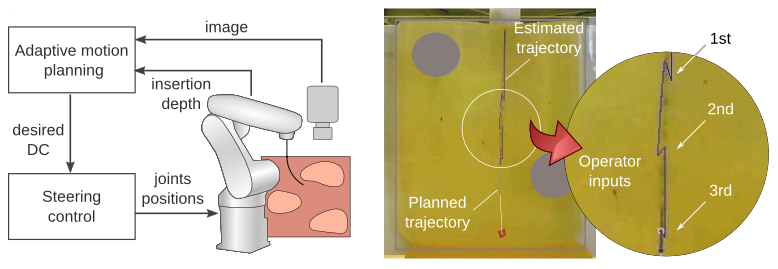
Steerable needles have been designed to expand the applicability of percutaneous procedures by allowing curved trajectories that can be used to avoid sensitive or impenetrable areas inaccessible with conventional rigid needles. The curvature of the trajectory can be controlled by using a duty-cycle technique that combines periods of pure insertion with periods of simultaneous insertion and rotation. We present a robotically assisted system for 2D needle steering that uses duty-cycling to perform insertions with arcs of adjustable curvature radius. It combines image feedback manually provided by an operator with an adaptive path planning strategy to compensate for system uncertainties and changes in the workspace during the procedure. Experiments have been conducted with plastisol phantoms and confirm the advantage of using image feedback combined with a replanning strategy. We also discuss ongoing work with the replacement of the manual feedback by an automatic tracking system.
Related Publications
-
M.C. Bernardes, B. V. Adorno, N. Zemiti, P. Poignet, and G. A. Borges, “Path planning for steerable needles using duty-cycling,” in Proc. International Conference and Exhibition of Computer-Assisted Radiology and Surgery, 2011, pp. 293-294.
-
M.C. Bernardes, B. V. Adorno, P. Poignet, N. Zemiti, and G. A. Borges, “Adaptive path planning for steerable needles using duty-cycling,” in Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems, 2011, pp. 2545-2550.
-
M.C. Bernardes, B. V. Adorno, P. Poignet and G. A. Borges, “Semi-automatic needle steering system with robotic manipulator,” in Proc. IEEE International Conference on Robotics and Automation, 2012 (To appear).
Links
Needle Steering Project: http://www.lara.unb.br/wiki/