
Teleoperation of Steerable Needles in Cartesian Space
Ann Majewicz and Allison Okamura
Department of Mechanical Engineering, Stanford University
Abstract
Steerable needles can be used to improve the effectiveness of needle-based clinical procedures by allowing needles to reach targets and avoid critical structures (e.g. nerves, vessels, bones) though curved paths. These needles may be difficult to control manually due to underactuation and kinematic constraints. We propose a robotic-assisted teleoperation paradigm to aid the placement of steerable needles with a haptic interface.
Previously, our group has teleoperated tip-asymmetric steerable needles using “joint space” control, where the user controls the input degrees of freedom to the needle steering robot (i.e. insertion and rotation). Here, the user has the burden of predicting the nonholonomic behavior of the needle resulting from their inputs. In this work, the needle is teleoperated using “spatial” control, where the user controls the 3D needle tip position.
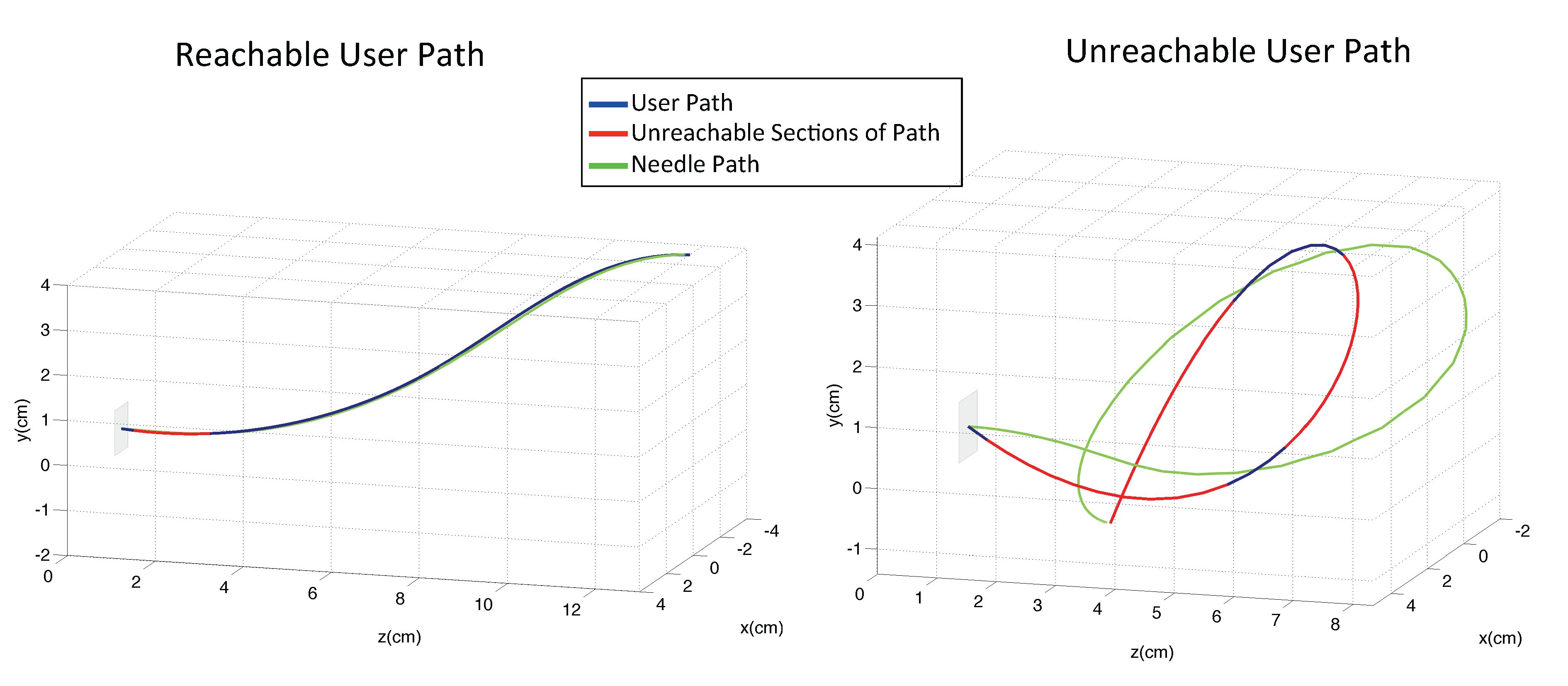
Our teleoperation paradigm is appropriate for steerable needles with the following properties: (1) steerable needles that follow constant curvature arcs during insertion, (2) the curvature of each path segment can be changed via duty-cycled spinning or by actively changing the degree of tip asymmetry, and (3) needles steer in a plane defined by the orientation of the needle tip. For teleoperation, a unique constant-curvature arc connecting the user’s desired position and the current needle configuration can be found. The error between the desired and current needle position determines the insertion speed of the needle. If the user attempts to steer the needle to an unreachable position (due to needle kinematic constraints) the planner will find an arc to the closest reachable point and provide force feedback to the user, providing forces in the direction of the reachable workspace through a virtual coupling.
Related Publications
-
J. M. Romano, R. J. Webster III, and A. M. Okamura, “Teleoperation of Steerable Needles,” IEEE International Conference on Robotics and Automation 2007, pp. 934-939, 2007.
-
K. B. Reed, A. Majewicz, V. Kallem, R. Alterovitz, K. Goldberg, N. J. Cowan, and A. M. Okamura. Robot-assisted needle steering. IEEE Robotics and Automation Magazine, 18(4):35-46, 2011.
-
A. Majewicz, T. Wedlick, K. B. Reed, and A. M. Okamura. Evaluation of needle steering in ex vivo tissue. In IEEE International Conference on Robotics and Automation, 2010. pp. 2068-2073.
Links
https://www.lcsr.jhu.edu/