
Integrating motion planning and control of steerable needles: Real-time re-planning vs. deformation-aware LQG control
Sachin Patil and Ron Alterovitz
Department of Computer Science, University of North Carolina at Chapel Hill
Abstract
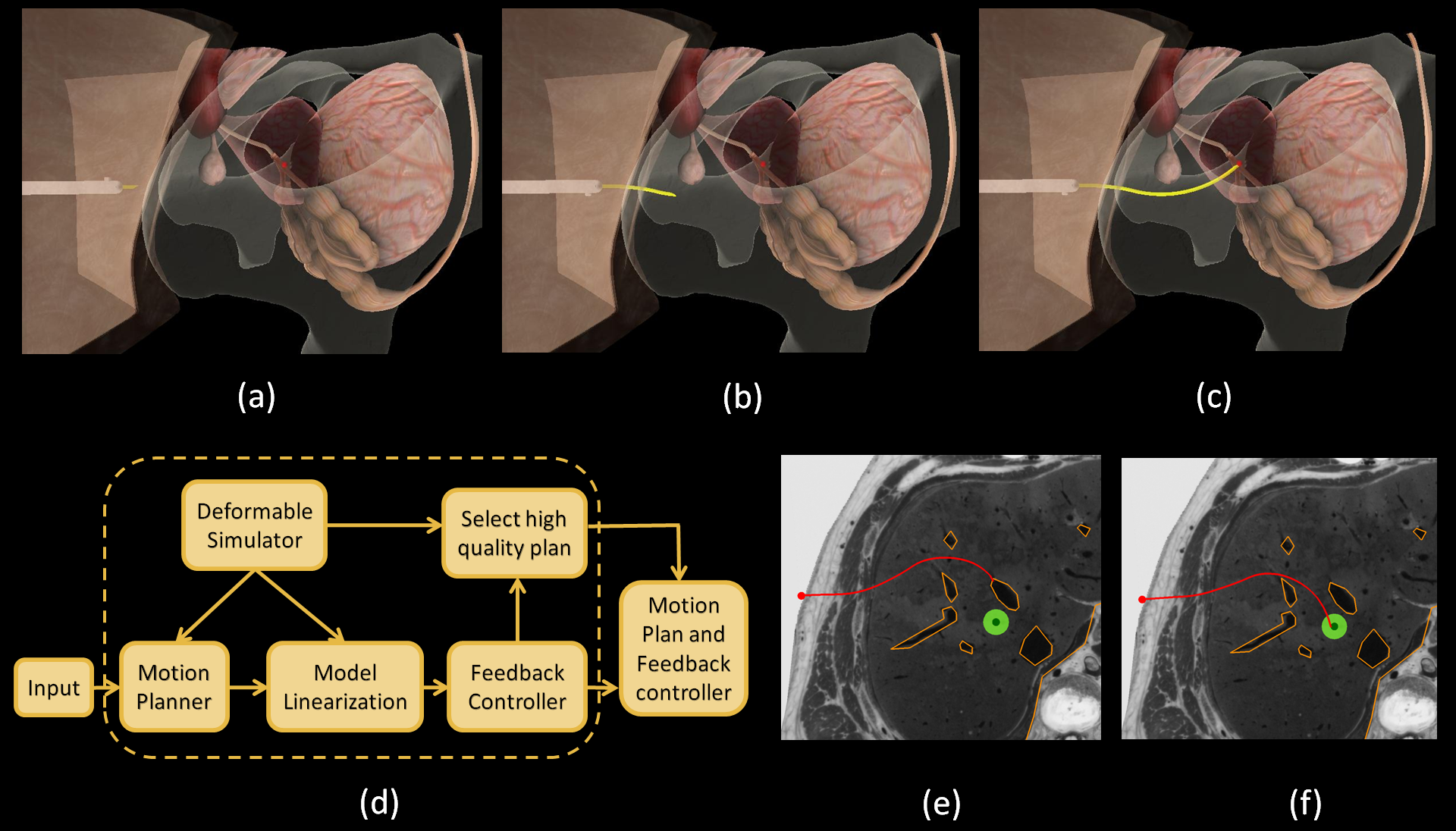
Bevel-tip steerable needles for minimally invasive medical procedures can reach clinical targets that are behind sensitive or impenetrable areas and are inaccessible to straight, rigid needles. Such needles can be controlled within deformable tissue by inserting and twisting the needle externally at the base. However, guiding the needle to a desired target is challenging for a human operator due to the presence of anatomical obstacles, nonholonomic motion of the needle tip, tissue deformations, needle motion uncertainty, and limited sensor feedback. To assist physicians, we have developed motion planning and feedback control algorithms that consider these challenges to safely maneuver a steerable needle to a desired target.
In this work, we evaluate and compare two approaches for planning and control of steerable needles in deformable tissue with obstacles that maximizes the probability of successfully avoiding obstacles and reaching the target. The first approach accounts for unpredictable disturbances during execution by planning at interactive rates from the current configuration to the target using a customized rapidly-exploring random tree (RRT) planner. This allows us to generate several candidate plans in real-time, of which the plan that maximizes the probability of success is chosen for execution at each time step. The second approach provides a unified planning and control framework that takes uncertainty into account in the planning process for computing a high quality motion plan that maximizes the probability of success. This method then supplements the motion plan with a deformation-aware linear quadratic Gaussian (LQG) controller for closed-loop correction of errors occurring during execution. We evaluate the performance and effectiveness of the two approaches in clinically inspired scenarios, analyze the pros and cons of each approach, and suggest directions for future research.
Related Publications
-
S. Patil and R. Alterovitz. Interactive Motion Planning for Steerable Needles in 3D Environments with Obstacles. Proc. IEEE Int. Conf. on Biomedical Robotics and Biomechatronics (BioRob), 2010:893-899.
-
S. Patil, J. van den Berg, and R. Alterovitz. Motion Planning under Uncertainty in Highly Deformable Environments. Proc. Robotics Science and Systems (RSS), 2011
Links
http://robotics.cs.unc.edu/