
An Optical Actuation System and Curvature Sensor for a MR-compatible Active Needle
Seok Chang Ryu1, Zhan Fan Quek1, Pierre Renaud2, Richard J. Black3, Bruce L. Daniel4 and Mark R. Cutkosky1
1 Mechanical Engineering at Stanford University, Stanford
2 LSIIT, Strasbourg University - CNRS - INSA, Strasbourg,France
3 Intelligent Fiber Optic Systems Corporation, Santa Clara
4 Radiology at Stanford University, Stanford
Abstract
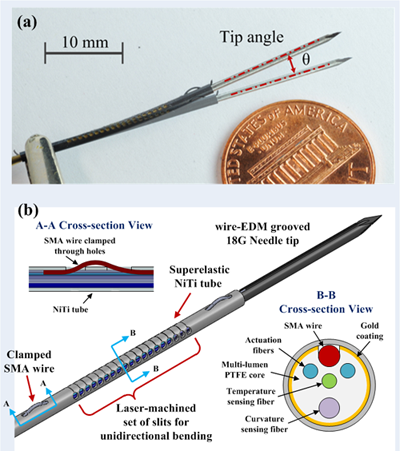
A side optical actuation method is presented for a slender MR-compatible biopsy needle. The needle includes an active region with a shape memory alloy (SMA) wire actuator, where the wire generates a contraction force when optically heated by laser light delivered though optical fibers, producing needle tip bending. A prototype, with multiple side heating regions, demonstrates twice as fast an initial response compared to fiber tip heating when 0.8 W of optical power is applied. A single-ended optical sensor with a gold reflector is also presented to measure the curvature independently of temperature as a function of optical transmission loss. Preliminary tests with the sensor prototype demonstrate approximately linear response and a repeatable signal, independent of the bending history.
Related Publications
-
S. Ryu, Z. F. Quek, P. Renaud, R. J. Black, B. Daniel, and M. R. Cutkosky. "An Optical Actuation System and Curvature Sensor for a MR-compatible Active Needle," IEEE International Conference on Robotics and Automation (ICRA), St. Paul, Minnesota, May 14-18, 2012
-
S. Ryu, P. Renaud, R. J. Black, B. Daniel, and M. R. Cutkosky. “Feasibility Study of an Optically Actuated MR-compatible Active Needle," IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), San Francisco, California, September 25-30, 2011
Links
http://bdml.stanford.edu/Main/ICRA2012WORKSHOP