

Using Rotational Friction Models to Enhance the Perception of Needle Tip Forces
Thomas R. Wedlick1, Marc E. Levenston2, Allison M. Okamura2
1 Johns Hopkins University
2 Stanford University
Abstract
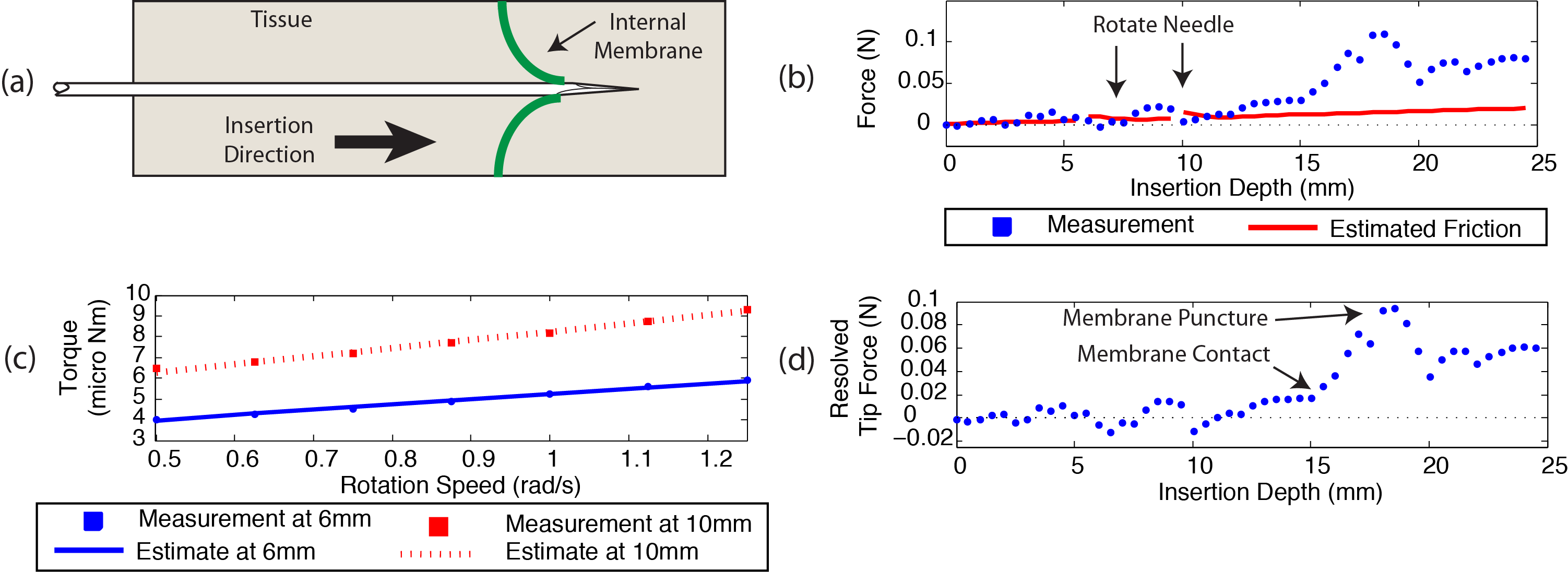
Identifying needle insertion events, such as when a needle tip contacts a membrane embedded deep within tissue, is clinically important for localization and avoiding unwanted puncture of subsurface structures. Detecting a contact event is challenging because soft tissue membranes are not visible under x-ray imaging and because needle tip forces can be difficult to resolve from the frictional forces along a needle’s shaft. A prior study used a needle insertion robot that mechanically isolated needle tip forces from needle shaft forces to conclude that users were better able to detect the location of internal membranes when only the needle tip forces were provided as force feedback [1-2]. We now demonstrate a mechanically simpler approach that uses a single force sensor mounted to a needle’s base, friction models, and the recently identified relationship between friction during needle insertion and friction during needle rotation [3]. Using data acquired during needle rotation, a friction model was fit and the frictional forces during robot-controlled needle insertion were estimated. By subtracting the estimated frictional forces from the total insertion forces, the perception of the tip forces was enhanced. The effectiveness of this technique in helping to identify membrane contact within artificial and ex-vivo tissues is discussed and the detailed frictional behavior of several artificial and biological tissues (Plastisol, pig liver, calf liver, chicken breast) used in many prior needle steering studies is also presented. This second contribution is particularly relevant to modeling and controlling the torsion in steerable needles.
References
-
[1] Y. Koseki, D. De Lorenzo, K. Chinzei, and A. M. Okamura. Coaxial Needle Insertion Assistant for Epidural Puncture. In IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 2584-2589, 2011.
-
[2] D. De Lorenzo, Y. Koseki, E. De Momi, K. Chinzei, and A. M. Okamura. Experimental evaluation of a coaxial needle insertion assistant with enhanced force feedback. In 33rd Annual International Conference of the IEEE Engineering in Medicine and Biology Society, pp. 3447-3450, 2011.
-
[3] T. Wedlick, A.M. Okamura. Characterization of Robotic Needle Insertion and Rotation in Artificial and Ex Vivo Tissues. IEEE International Conference on Biomedical Robotics and Biomechatronics and Symposium on Surgical Robotics. June 24-27, 2012 Roma, Italy. In press.
Links
CHARM Laboratory at Stanford University: http://charm.stanford.edu