
Motion Planning for Safe Clinical Needle Steering
Ron Alterovitz1
1 Department of Computer Science, The University of North Carolina at Chapel Hill
Abstract
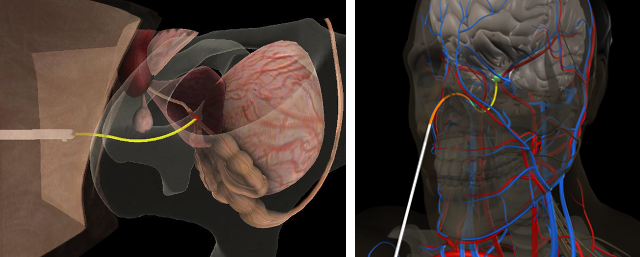
Steerable needles can maneuver along curved paths around anatomical obstacles such as bones, nerves, and sensitive organs to perform medical procedures at sites inaccessible to traditional straight instruments. We introduce new motion planning algorithms to automatically and safely steer such needles around anatomical obstacles to physician-specified clinical targets. Our methods can compute plans on a patient- and procedure-specific basis using anatomical structures identified in pre-operative and intra-operative medical images. Motion planning for needle steering is complicated by nonholonomic constraints on the needle's motion, limited intra-operative sensing, soft tissue deformation during needle insertion, uncertainty in needle/tissue interaction forces, and the importance of obstacle avoidance for patient safety. We are addressing these challenges by creating a unified planning framework that combines physically-based simulation, uncertainty modeling, online state estimation, and optimal control theory to compute plans that maximize the probability that obstacles are avoided and that the target site is successfully reached. We apply our algorithms to two classes of steerable needles: bevel-tip flexible needles and concentric tube robots. We also discuss ongoing collaborations and applications to radiation oncology, neurosurgery, and cardiothoracic surgery.
Related Publications
-
Kyle B. Reed, Ann Majewicz, Vinutha Kallem, Ron Alterovitz, Ken Goldberg, Noah J. Cowan, Allison M. Okamura, "Robot-Assisted Needle Steering," IEEE Robotics and Automation Magazine, vol. 18, pp. 35-46, Dec. 2011.
-
Luis G. Torres and Ron Alterovitz, "Motion Planning for Concentric Tube Robots Using Mechanics-based Models," in Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Sept. 2011, pp. 5153-5159.
-
Sachin Patil, Jur van den Berg, and Ron Alterovitz, "Motion Planning Under Uncertainty In Highly Deformable Environments," in Proc. Robotics: Science and Systems (RSS), June 2011.
-
Ron Alterovitz, Sachin Patil, and Anna Derbakova, "Rapidly-Exploring Roadmaps: Weighing Exploration vs. Refinement in Optimal Motion Planning," in Proc. IEEE International Conference on Robotics and Automation (ICRA), May 2011, pp. 3706-3712.
-
Jur van den Berg, Sachin Patil, Ron Alterovitz, Pieter Abbeel and Ken Goldberg, "LQG-Based Planning, Sensing, and Control of Steerable Needles, in Algorithmic Foundation of Robotics IX (WAFR 2010), D. Hsu et al. (Eds.), STAR vol. 68, Springer-Verlag, 2010, pp. 373-389.
-
Sachin Patil and Ron Alterovitz, "Interactive Motion Planning for Steerable Needles in 3D Environments with Obstacles," in Proc. IEEE RAS/EMBS Int. Conf. Biomedical Robotics and Biomechatronics (BioRob), Sep. 2010, pp. 893-899.
-
Vincent Duindam, Jijie Xu, Ron Alterovitz, Shankar Sastry, and Ken Goldberg, "Three-dimensional Motion Planning Algorithms for Steerable Needles Using Inverse Kinematics," International Journal of Robotics Research, vol. 29, no. 7, pp. 789-800, June 2010.
-
Lisa A. Lyons, Robert J. Webster III, and Ron Alterovitz, "Planning Active Cannula Configurations Through Tubular Anatomy," in Proc. IEEE International Conference on Robotics and Automation (ICRA), May 2010, pp. 2082-2087.
-
Nuttapong Chentanez, Ron Alterovitz, Daniel Ritchie, Jonha Cho, Kris Hauser, Ken Goldberg, Jonathan R. Shewchuk, and James F. O'Brien, "Interactive Simulation of Surgical Needle Insertion and Steering," ACM Transactions on Graphics (Proc. SIGGRAPH), vol. 28, no. 3, pp. 88:1-88:10, Aug. 2009.
-
Lisa A. Lyons, Robert J. Webster III, and Ron Alterovitz, "Motion planning for active cannulas," in Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Oct. 2009, pp. 801-806.
-
Ron Alterovitz, Michael Branicky, and Ken Goldberg, "Motion Planning Under Uncertainty for Image-Guided Medical Needle Steering," International Journal of Robotics Research, vol. 27, no. 11-12, pp. 1361-1374, Nov. 2008.
-
Kris Hauser, Ron Alterovitz, Nuttapong Chentanez, Allison Okamura, and Ken Goldberg, "Feedback Control for Steering Needles Through 3D Deformable Tissue Using Helical Paths," in Proc. Robotics: Science and Systems, June 2009.
-
Ron Alterovitz, Thierry Siméon, and Ken Goldberg, "The Stochastic Motion Roadmap: A Sampling Framework for Planning with Markov Motion Uncertainty," in Robotics: Science and Systems III (Proc. RSS 2007), W. Burgard et al. (Eds.), MIT Press, 2008, pp. 233-241.
-
Ron Alterovitz, Ken Goldberg, and Allison Okamura, "Planning for Steerable Bevel-tip Needle Insertion Through 2D Soft Tissue with Obstacles," in Proc. IEEE International Conference on Robotics and Automation (ICRA), Apr. 2005, pp. 1652-1657.
Links
Computational Robotics Laboratory at UNC-Chapel Hill: http://robotics.cs.unc.edu