
Managing Uncertainty in Motion Planning for Steerable Needles
Ken Goldberg1
1 University of California, Berkeley
Abstract
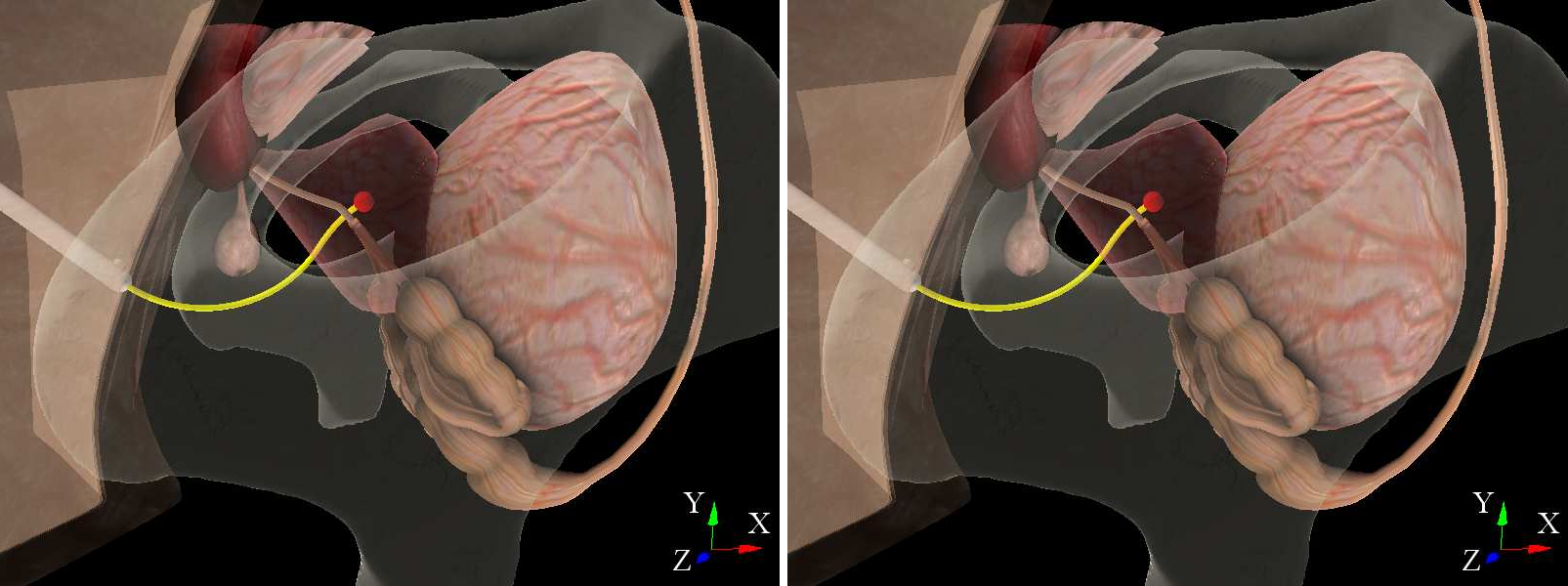
We present motion planning algorithms for steerable medical needles, a new class of flexible, bevel-tip needles capable of following curved paths through soft tissue. Due to their greater mobility, steerable needles can reach targets inaccessible to traditional stiff needles. Planning motions for these needles to a target while avoiding obstacles is difficult due to nonholonomic constraints, the effects of tissue deformations during needle insertion, and uncertainty in needle motion due to complex needle/tissue interactions. This talk will present a technique for planning and controlling bevel-tip steerable needles towards a target location in 3-D anatomy under the guidance of partial, noisy sensor feedback. Our approach minimizes the probability that the needle intersects obstacles such as bones and sensitive organs by (1) explicitly taking into account motion uncertainty and sensor types, and (2) allowing for efficient optimization of sensor placement. We allow for needle trajectories of arbitrary curvature through duty-cycled spinning of the needle, which is believed to make a needle path small-time locally “trackable”. This enables us to use LQG control to guide the needle along the path. For a given path and sensor placement, we show that a priori probability distributions of the needle state can be estimated in advance. Our approach then plans a set of candidate paths and sensor placements and selects the pair for which the estimated uncertainty is least likely to cause intersections with obstacles. We demonstrate the performance of our approach in a modeled prostate cancer treatment environment.
Related Publications
-
Robot-Assisted Needle Steering. Kyle B. Reed, Ann Majewicz, Vinutha Kallem, Ron Alterovitz, Ken Goldberg, Noah J. Cowan, and Allison M. Okamura. IEEE Robotics and Automation Magazine. V18:4, pp 35-46. December 2011..
-
LQG-MP: Optimized Path Planning for Robots with Motion Uncertainty and Imperfect State Information. Jur van den Berg, Pieter Abbeel, Ken Goldberg.International Journal of Robotics Research. Vol. 30 (6). June 2011.
-
LQG-Based Planning, Sensing, and Control of Steerable Needles. Jur van den Berg, Sachin Patil, Ron Alterovitz, Pieter Abbeel, Ken Goldberg. Ninth Workshop on Algorithmic Foundations of Robotics (WAFR). Singapore. December 2010.
-
Three-dimensional Motion Planning Algorithms for Steerable Needles Using Inverse Kinematics. Vincent Duindam, Jijie Xu, Ron Alterovitz, Shankar Sastry, Ken Goldberg. International Journal of Robotics Research. October 2009.
-
Interactive Simulation of Surgical Needle Insertion and Steering. Nuttapong Chentanez, Ron Alterovitz, Daniel Ritchie, Lita Cho, Kris Hauser, Ken Goldberg, JonathonShewchuk, James O'Brien. Proceedings of ACM SIGGRAPH , Annual Conference Series. (New Orleans, Louisiana), Aug. 2009.
-
Feedback Control for Steering Needles Through 3D Deformable Tissue Using Helical Paths. Kris Hauser, Ron Alterovitz, Nuttapong Chentanez Allison Okamura, and Ken Goldberg. Robots: Science and Systems (RSS) Conference. Seattle, WA, June 2009.
-
Motion Planning Under Uncertainty for Image-Guided Medical Needle Steering. Ron Alterovitz, Michael Branicky, Ken Goldberg. International Journal of Robotics Research. 27:1361-1374, Nov, 2008.
Links