
Integrating Deflection Models and Real-Time Image Feedback for Flexible Needle Steering
Sarthak Misra1
1 University of Twente, Netherlands
Abstract
This talk combines needle deflection models
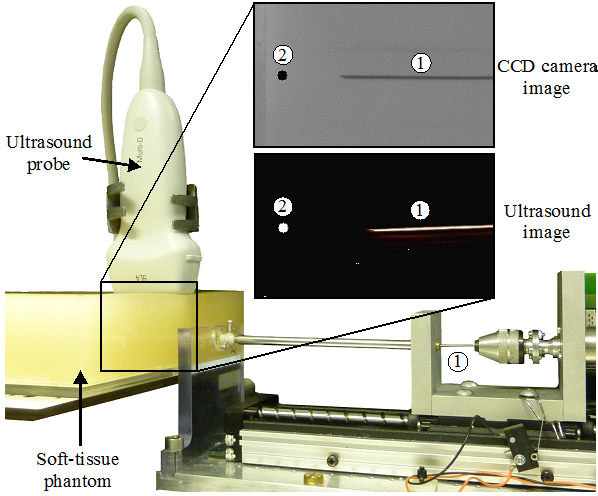
with image-guided techniques to steer flexible needles to a moving
target. Two different models for predicting needle deflection
undergoing multiple bends are presented. The first is a
kinematics-based model, and the second model predicts needle
deflection based on the mechanics of needle-tissue interaction. The
models are validated using
double bend experiments in soft-tissue simulants, and also using
a needle embedded with Fiber Bragg Grating sensors. The
kinematics-based model is used for steering the needles under
image-guidance. The proposed steering algorithm is demonstrated
using camera and ultrasound images as feedback while compensating
for target motion. The algorithm is also used to track a needle
undergoing multiple bends in 3D using a 2D ultrasound probe.
Related Publications
-
R J Roesthuis, M Abayazid, and S Misra, “Mechanics-based model for predicting in-plane needle deflection with multiple bends”, in Proceedings of the IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob), Rome, Italy, June 2012. Accepted.
-
R J Roesthuis, Y R J van Veen, A Jahya, and S Misra, “Mechanics of needle-tissue interaction”, in Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), San Francisco, USA, pages 2557-2563, September 2011
-
S Misra, K B Reed, B W Schafer, K T Ramesh, and A M Okamura, "Mechanics of flexible needles robotically steered through soft tissue", The International Journal of Robotics Research, 29(13): 1640-1660, November 2010
-
S Misra, K B Reed, K T Ramesh, and A M Okamura, "Observations of needle-tissue interactions", in Proceedings of the International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), pages 262-265, Minneapolis, USA, September 2009.
-
S Misra, K B Reed, B W Schafer, K T Ramesh, and A M Okamura, "Observations and models for needle-tissue interactions", in Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), pages 2687-2692, Kobe, Japan, May 2009.
-
S Misra, K B Reed, A S Douglas, K T Ramesh, and A M Okamura, "Needle-tissue interaction forces for bevel-tip steerable needles", in Proceedings of the IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob), pages 224-231, Scottsdale, USA, October 2008
Links