
Technologies Toward Needle Steering in Biological Tissue
Allison Okamura1,2, with contributions from Yoshihiko Koseki3, Danilo De Lorenzo4, Thomas Wedlick2, Ann Majewicz1, and Troy Adebar1, and Steven Marra2
1 Department of Mechanical Engineering, Stanford University, USA
2 Department of Mechanical Engineering, Johns Hopkins University, USA
3 Research Institute of Human Life Technology, Advanced Industrial Science and Technology, Japan
4 Bioengineering Department, Politecnico di Milano, Italy
Abstract
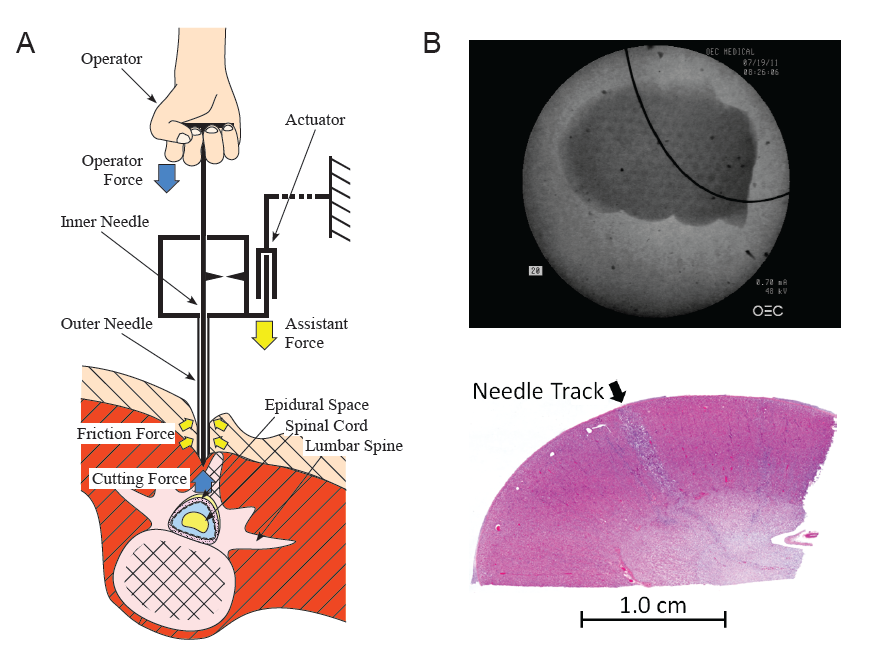
To achieve clinically useful needle steering in biological tissue, robot-assisted needle steering approaches will need to address numerous challenges associated with working in inhomogeneous and anisotropic soft tissues. We are developing several needle steering support technologies that avoid the use of very detailed predictions of needle-tissue interaction and tissue deformation. First, we explore two methods of providing useful force feedback or notification to the operator regarding changing tissue properties or the presence of membranes, using (1) a co-axial needle insertion assistant and (2) the recording of behavior during needle spinning to predict behavior during needle insertion. Second, we will describe algorithms for “Cartesian space” teleoperation of nonholonomic systems, which could enable clinical users to more intuitively direct steerable needles to desired targets. Third, we examine a method to detect the pose of curved needles in soft tissue using Doppler ultrasound. Finally, we evaluate various mechanisms of soft tissue damage that can occur as needles with asymmetric tips are inserted and rotated inside the body, and demonstrate that damage is minimal for steerable needle insertion into both ex vivo and in vivo biological tissue. Together, these approaches and studies provide evidence that effective needle steering may be achieved in realistic clinical scenarios.
Related Publications
-
Y. Koseki, D. De Lorenzo, K. Chinzei, and A. M. Okamura. Coaxial Needle Insertion Assistant for Epidural Puncture. In IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 2584-2589, 2011.
-
D. De Lorenzo, Y. Koseki, E. De Momi, K. Chinzei, and A. M. Okamura. Experimental evaluation of a coaxial needle insertion assistant with enhanced force feedback. In 33rd Annual International Conference of the IEEE Engineering in Medicine and Biology Society, pp. 3447-3450, 2011.
-
K. B. Reed, A. Majewicz, V. Kallem, R. Alterovitz, K. Goldberg, N. J. Cowan, and A. M. Okamura. Robot-assisted needle steering. IEEE Robotics and Automation Magazine, 18(4):35-46, 2011.
-
N. J. Cowan, K. Goldberg, G. S. Chirikjian, G. Fichtinger, R. Alterovitz, K. B. Reed, V. Kallem, W. Park, S. Misra, and A. M. Okamura. Robotic Needle Steering: Design, Modeling, Planning, and Image Guidance. In J. Rosen, B. Hannaford, and R. Satava, Eds., Surgical Robotics - Systems, Applications, and Visions, pp. 557-582. Springer, 2011.
-
A. Majewicz, T. Wedlick, K. B. Reed, and A. M. Okamura. Evaluation of needle steering in ex vivo tissue. In IEEE International Conference on Robotics and Automation, 2010. pp. 2068-2073.
Links
https://www.lcsr.jhu.edu/NeedleSteering