
Steerable Needles as Manipulators and Acoustic Ablators
Robert J. Webster III1
1 Vanderbilt University
Abstract
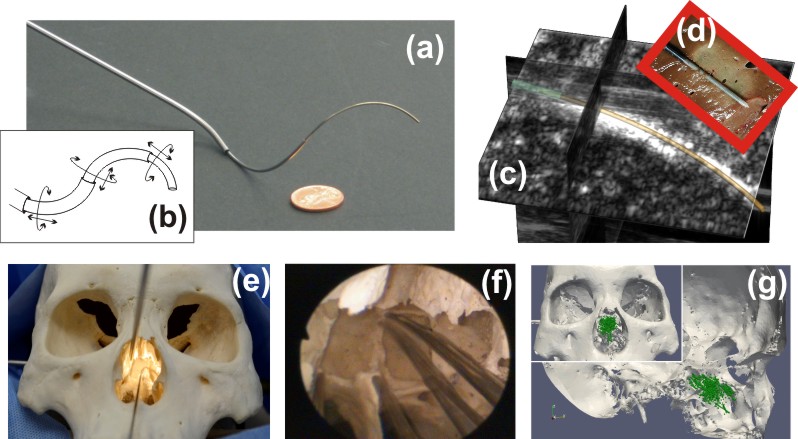
Concentric tube robots and bevel-steered needles are on the cusp of enabling many novel surgical and interventional procedures. Concentric tube robots have particular promise in endonasal skull base surgery, transoral and percutaneous lung access, and other applications requiring needle-diameter robot manipulators to reach into the body through curved paths. This talk will focus on recent modeling, design, sensing, and control results that are steps toward enabling surgeons to use these robots in real-world operating rooms. A complete system for endonasal skull base surgery with cannula-enhanced image guidance will be described, with recent cadaver study results. Also considered will be special cases of concentric tube robots that can be used as steerable needles in soft tissues, with specific applications in acoustic ablation of deep brain targets under Magnetic Resonance Imaging as well as large and geometrically complex liver tumors under three-dimensional ultrasound guidance. Bevel steering can enable similar applications, providing the advantage of a larger family of possible needle trajectories, at the cost of making the needle’s behavior more dependent on tissue and needle geometric and mechanical properties. Our work on this topic explores the two ends of the planning-control spectrum, illustrating that both pure control and pure planning are options for delivering the needle tip to its intended 3D destination in phantom and animal tissues.
Related Publications
-
D. C. Rucker, B. A. Jones, and R. J. Webster III. A Geometrically Exact Model for Externally Loaded Concentric Tube Continuum Robots. IEEE Transactions on Robotics, 26(5), 769-780, 2010.
-
R. J. Webster III and B. A. Jones. Design and Kinematic Modeling of Constant Curvature Continuum Robots: A Review. International Journal of Robotics Research, 29(13), 1661-1683, 2010.
-
D. C. Rucker, R. J. Webster III, G. S. Chirikjian, and N. J. Cowan. Equilibrium Conformations of Concentric-Tube Continuum Robots. International Journal of Robotics Research, 29(10), 1263-1280, 2010.
-
D. C. Rucker and R. J. Webster III. Parsimonious Evaluation of Concentric-Tube Continuum Robot Equilibrium Conformation. IEEE Transactions on Biomedical Engineering, 56(9), 2308-2311, 2009.
-
R. J. Webster III, J. M. Romano, and N. J. Cowan. Mechanics of Precurved-Tube Continuum Robots. IEEE Transactions on Robotics, 25(1), 67-78, 2009.
-
R. J. Webster III, J. S. Kim, N. J. Cowan, G. S. Chirikjian, and A. M. Okamura. Nonholonomic Modeling of Needle Steering, International Journal of Robotics Research, 25(5–6), 509-525, 2006.
-
H. Su, D. C. Cardona, W. Shang, A. Camilo, G. A. Cole, D. C. Rucker, R. J. Webster III, and G. S. Fischer. A MRI-Guided Concentric Tube Continuum Robot with Piezoelectric Actuation: A Feasibility Study. IEEE International Conference on Robotics and Automation, 2011.
-
P. J. Swaney, J. Burgner, T. S. Pheiffer, D. C. Rucker, H. B. Gilbert, J. E. Ondrake, A. L. Simpson, E. C. Burdette, M. I. Miga, and R. J. Webster III. Tracked 3D Ultrasound Targeting with an Active Cannula. SPIE Medical Imaging, 2012.
-
J. Burgner, P. J. Swaney, D. C. Rucker, H. B. Gilbert, S. T. Nill, P. T. Russell III, K. D. Weaver, and R. J. Webster III. A Bimanual Teleoperated System for Endonasal Skull Base Surgery. IEEE/RSJ International Conference on Intelligent Robots and Systems, 2517-2523, 2011.
-
J. Burgner, D. S. Herrell, and R. J. Webster III. Toward Fluroscopic Shape Reconstruction for Control of Steerable Medical Devices. ASME Dynamic Systems and Control Conference, 2011.
-
D. C. Rucker and R. J. Webster III. Computing Jacobians and Compliance Matrices for Externally Loaded Continuum Robots. IEEE International Conference on Robotics and Automation 945-950, 2011.
-
L. B. Kratchman, M. M. Rahman, and R. J. Webster III. Toward Robotic Needle Steering in Lung Biopsy: A Tendon-Actuated Approach. SPIE Medical Imaging, 2011.
-
L. A. Lyons, R. J. Webster III, and R. Alterovitz. Planning Active Cannula Configurations Through Tubular Anatomy. IEEE International Conference on Robotics and Automation, 2082-2087, 2010.
-
R. A. Lathrop, D. C. Rucker, and R. J. Webster III. Guidance of a Steerable Cannula Robot in Soft Tissue Using Preoperative Imaging and Conoscopic Surface Contour Sensing. IEEE International Conference on Robotics and Automation, 5601-5606, 2010.
-
E. C. Burdette, D. C. Rucker, P. Prakash, C. J. Diederich, J. M. Croom, C. Clarke, P. J. Stolka, T. Juang, E. M. Boctor, and R. J. Webster III. The ACUSITT Ultrasonic Ablator: The First Steerable Needle with an Integrated Interventional Tool. Proceedings of SPIE Medical Imaging, 2010.
-
L. A. Lyons, R. J. Webster III, and R. Alterovitz. Motion Planning for Active Cannulas. IEEE/RSJ International Conference on Intelligent Robots and Systems, 801–806, 2009.
-
J. M. Romano, R. J. Webster III, and A. M. Okamura. Teleoperation of Steerable Needles. IEEE International Conference on Robotics and Automation, 934-939, 2007.
-
R. J. Webster III, A. M. Okamura, and N. J. Cowan. Toward Active Cannulas: Miniature Snake-Like Surgical Robots. IEEE/RSJ International Conference on Intelligent Robots and Systems, 2857-2863, 2006. Best Paper Award Finalist.
-
R. J. Webster III, J. Memisevic, and A. M. Okamura. Design Considerations for Robotic Needle Steering. IEEE International Conference on Robotics and Automation, 3599-3605, 2005.
-
R. J. Webster III, J. P. Swensen, J. M. Romano, and N. J. Cowan. Closed-Form Differential Kinematics for Concentric-Tube Continuum Robots with Application to Visual Servoing. 11th International Symposium on Experimental Robotics 2008, Springer Tracts in Advanced Robotics 2009, 54, 485-494, 2008.
-
D. C. Rucker. The Mechanics of Continuum Robots: Model-Based Sensing and Control. Ph.D. Thesis, Department of Mechanical Engineering, Vanderbilt University, Nashville, TN, December 2011.
-
R. J. Webster III. Design and Mechanics of Continuum Robots for Surgery. Ph.D. Thesis, Department of Mechanical engineering, Johns Hopkins University, Baltimore, MD, December 2007.
Links
http://research.vuse.vanderbilt.edu/MEDLab/