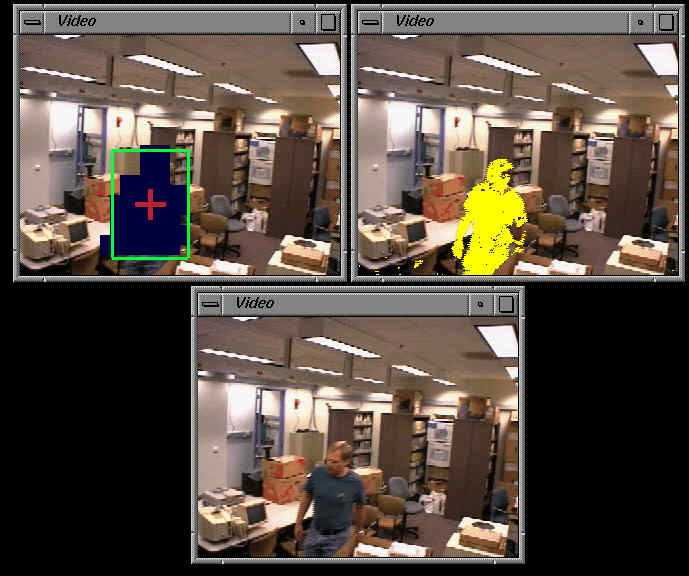
Screen snap shot of an MPI-video system in operation: (bottom) video stream from file, (upper left) segmentation, bounding box and centroid of person in scene, (upper right) alternative segmentation of video stream.
We implemented the MPI-Video EM using C++. The implementation consists of:
To build an MPI-video system, one must first decide what layers are needed and then implement them. This is done by creating subclasses of the EM layer base class. The subclass must contain state variables and methods to override the base class initialization, extrapolation and update methods. Most details of the iterative system are hidden from the implementation of a single layer type so these methods tend to be easy to write, however, a working knowledge of C++ is required. A layer need not always take advantage of the dynamic capabilities of the system. When there is no reasonable dynamic model of the state of a system, e.g., image data and static environment information, we simply use an identity operation for the extrapolation. A layer must provide a means for other layers to access its state. When a layer does its update, it is provided with a list of pointers to layers from which it obtains input. The update method invokes the state access methods for the other layers to get their data, and then performs an update using that data. Once the subclass for a layer type is defined, it is added to the library of all layer types.
With a sufficient library of layer types in hand, it is then necessary to configure the EM. We do this with a configuration file (plain text) that describes the layers in the EM and how they should interact. The file consists of a list of layers in the EM. Each layer has a layer type, a name, a group name, some initialization parameters, and a list of other layers from which it receives input. The group name is required for keeping track of groups of layers that work together. For example, when a three-dimensional tracking layer combines data from multiple cameras, it also needs camera calibration data from multiple layers and it must match each set of calibration data with the correct camera. Group names resolve the ambiguity. An example configuration file follows.
# EMV1.0
#
# Spec file to show EM for algorithm evaluation. Segmentation routine
# running w/ different parameters on same input sequence.
#
#
# column contents
#
# type | name | group |input connections | init info;
#
# Same input stream.
EmMpiv0In vidIn0 group0 {"twocam0.mpiv"};
EmSegment seg0 group0 vidIn0 {"initAlgorEval1.seg"};
EmSegment seg1 group0 vidIn0 {"initAlgorEval2.seg"};
EmViz vizlayer group0 seg0 seg1 {"init2.viz"};
Example of an MPI-video EM configuration file.
The last step in building an MPI-Video system is to create a main program that invokes a method to build the EM from the configuration file, and then invokes a method to run the EM. To date, we have only used a single main program and alter the EM by changing the code for layers and by editing configuration files. Once a sufficiently powerful library of layers is developed over time only the configuration files will need to be altered to create new EMs.
At the time of writing, we have not implemented access methods to facilitate server/client interaction. Therefore, in order to visualize the state of the EM and verify its operation, we implemented visualization layers. These layers have no state and do no extrapolation. They simply display the image data that they get from other layers during update. In the long term, visualization will be done by an EM client, but visualization layers allow for easy debugging of a system without the need for a client.
The figure below shows a screen snap shot taken during the operation of a simple MPI-video system.
Screen snap shot of an MPI-video system in operation: (bottom) video stream from file, (upper left) segmentation, bounding box and centroid of person in scene, (upper right) alternative segmentation of video stream.
MPI VSAM Home Page --
Executive Summary --
Our Vision --
Project Information --
Papers --
Investigators --
Administrative Staff --
Related Links
Web page design by Jeffrey E. Boyd