Single Camera Surveillance Technologies
Keeping track of people, vehicles
and their interactions in a complex environment is a difficult task. The
first step of VSAM video understanding technology is to automatically "parse"
people and vehicles from raw video. We have developed robust routines for
detecting moving objects and tracking them through a video sequence using
a combination of temporal differencing and template tracking. Detected
objects are classified into semantic categories such as human, human group,
car, and truck using shape and color analysis, and these labels are used
to improve tracking using temporal consistency constraints. Further classification
of human activity, such as walking and running, has also been achieved.
Moving Object Detection
Detection of moving objects in video
streams is the first stage in automated video surveillance. Aside from
the intrinsic usefulness of being able to segment video streams into moving
and background components, detecting moving blobs provides a focus of attention
for recognition, classification, and activity analysis, making these later
processes more efficient since only "foreground" pixels need be considered.
CMU has developed three methods for moving object detection within the
VSAM testbed. A fourth approach to moving object detection from a
moving airborne platform has been developed by the Sarnoff Corporation.
This approach, based on image stabilization using special video processing
hardware, is described in the section on Airborne
Surveillance.
A Hybrid Algorithm for Moving Object
Detection
We have developed a hybrid algorithm
for detecting moving objects, by combining adaptive background subtraction
with three-frame differencing. We combine the two methods by using three-frame
differencing to determine regions of legitimate motion, followed by adaptive
background subtraction in those regions to extract the entire moving object.
This hybrid algorithm is very fast, and surprisingly effective -- it is
the primary algorithm used by the majority of the SPUs in the VSAM testbed
system.
Temporal Layers for Adaptive Background
Subtraction
A robust detection system should continue
to "see" objects that have ceased moving, and to disambiguate between overlapping
objects. This is usually not possible with traditional pixel-based motion
detection algorithms. We have developed a mechanism for maintaining
temporal object layers to allow greater disambiguation of moving objects
that stop for a while, are occluded by other objects, and then resume motion.
Layered detection is based on two
processes: pixel analysis and region analysis. The purpose of pixel analysis
is to determine whether a pixel is stationary or transient by observing
its intensity value over time. The technique is derived from the observation
that legitimately moving objects in a scene cause much faster intensity
transitions than changes due to lighting, meteorological, and diurnal effects.
Region analysis collects groups of labeled pixels into moving regions and
stopped regions,
and assigns them to spatio-temporal
layers. A layer management process keeps track of the various background
layers.

Background Subtraction from a Continuously
Panning Camera
Pan-tilt camera platforms maximize the
virtual field of view of a single camera without the loss of resolution
that accompanies a wide-angle lens. They also allow for active tracking
of an object of interest through the scene. However, moving object
detection using background subtraction is not directly applicable to a
camera that is panning and tilting, since all image pixels are moving .
It is well known that camera pan/tilt is approximately described
as a pure camera rotation, where apparent motion of pixels depends only
on the camera motion, and not on the 3D scene structure. In this respect,
the problems associated with a panning and tilting camera are much easier
than if the camera were mounted on a moving vehicle traveling through the
scene.
An initial background model is constructed
by methodically collecting a set of images with known pan-tilt settings.
The main technical challenge is how to register incoming video frames to
the appropriate background reference image in real-time. We have developed
a novel approach to registration that relies on selective integration
of information from a small subset of pixels that contain the most information
about the state variables to be estimated (2D projective transformation
parameters). The dramatic decrease in the number of pixels to process results
in a substantial speedup of the registration algorithm, to the point that
it runs in real-time on a modest PC platform. More details can be
found in Dellaert
and Collins, 1999.

Object Tracking
To begin building a temporal model of
activity, individual object blobs generated by motion detection are tracked
over time by matching them between frames of the video sequence. Given
a moving object region in a current frame, we determine the best match
in the next frame by performing image correlation matching, computed
by convolving the object's intensity template over candidate regions in
the new image. Due to real-time processing constraints in the VSAM
testbed system, this basic correlation matching algorithm is only
computed for "moving'' pixels, regions are culled that are inconsistent
with current estimates of object position and velocity , and imagery is
dynamically sub-sampled to ensure a constant computation time per match.
The tracker maintains multiple match hypotheses, and can split and merge
hypotheses when appropriate in order to disambiguate objects that pass
each other, causing temporary pixel occlusion in the image. More
details can be found in Lipton,
1999a and Collins
et.al., 2000.

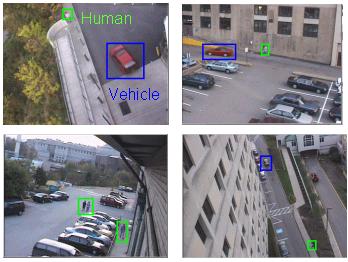
Object Type Classification
The ultimate goal of the VSAM effort
is to identify individual entities. As a first step, two object
classification algorithms have been developed. The first uses view
dependent visual properties to train a neural network classifier to recognize
four classes: single human; human group; vehicles; and clutter. Each
neural network is a standard three-layer network, trained using the backpropagation
algorithm. Input features to the network are a mixture of image-based and
scene-based object parameters: image blob dispersedness, image blob area;
apparent aspect ratio, and camera zoom. This neural network classification approach
is fairly effective for single images; however, one of the advantages of
video is its temporal component. To exploit this, classification
is performed on each blob at every frame, and the results of classification
are kept in a histogram. At each time step, the most likely class label
for the blob is chosen, as described in Lipton,
Fujiyoshi and Patil, 1998.
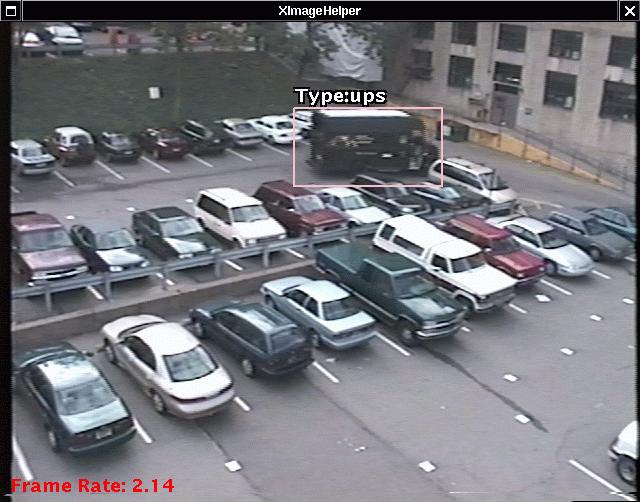
The second method of object classification
uses linear discriminant analysis to provide a finer distinction between
vehicle types (e.g. van, truck, sedan) and colors. This method has
also been successfully trained to recognize specific types of vehicles,
such as UPS trucks and campus police cars. The method has two sub-modules:
one for classifying object shape, and the other for determining color (this
is needed because the color of an object is difficult to determine under
varying outdoor lighting). Each sub-module computes an independent discriminant
classification space using linear discriminant analysis (LDA), and calculates
the most likely class in that space using a weighted k-class nearest-neighbor
(k-NN) method. In LDA, feature vectors computed on training examples
of different object classes are considered to be labeled points in a high-dimensional
feature space. LDA then computes a set of discriminant functions,
formed as linear combinations of feature values, that best separate the
clusters of points corresponding to different object labels. See
Collins
et.al., 2000 for more details.
Another approach to distinguish between living objects (e.g. humans,
animals) and non-living objects (e.g. vehicles) is to measure the
rigidity of the moving object. Two different approaches can be found
in Lipton, 1999b
and in Selinger
and Wixson, 1998.
Activity Analysis
After detecting objects and classifying
them as people or vehicles, we would like to determine what these objects
are doing. In our opinion, the area of activity analysis is one of
the most important open areas in video understanding research. We have
developed two prototype activity analysis procedures. The first uses the
changing geometry of detected motion blobs to perform gait analysis of
walking and running human beings. The second uses Markov model
learning to classify simple interactions between multiple objects, such
as two people meeting, or a vehicle driving into the scene and dropping
someone off.
Gait Analysis
We have developed a "star'' skeletonization
procedure for analyzing human gaits. The star skeleton consists of the
centroid of a motion blob, and all of the local extremal points that
are recovered when traversing the boundary of the blob. For a human being,
the uppermost star skeleton segment is assumed to represent the torso,
and the lower left segment is assumed to represent a leg, which can
be analyzed for cyclic motion. The posture of a running person can
easily be distinguished from that of a walking person, using the angle
of the torso segment as a guide. Also, the frequency of cyclic motion of
the leg segments provides cues to the type of gait. See Fujiyoshi
and Lipton, 1998 for details.

Activity Recognition using Markov
Models
We have developed a prototype activity
recognition method that estimates activities of multiple objects from attributes
computed by low-level detection and tracking subsystems. The activity
label chosen by the system is the one that maximizes the probability of
observing the given attribute sequence. To obtain this, a Markov
model is introduced that describes the probabilistic relations between
attributes and activities. We tested the functionality of our method with
synthetic scenes which have human-vehicle interaction. In our test system,
continuous feature vector output from the low-level detection and tracking
algorithms is quantized into a discrete set of attributes and values
for each tracked blob
-
object class: Human, Vehicle,
HumanGroup
-
object action: Appearing, Moving,
Stopped, Disappearing
-
interaction: Near, MovingAwayFrom,
MovingTowards, NoInteraction
These features were quantized into symbols
and used as the input of the system. } The activities to be labeled are
1) A Human entered a Vehicle, 2) A Human got out of a Vehicle, 3) A Human
exited a Building, 4) A Human entered a Building, 5) A Vehicle parked,
and 6) Human Rendezvous. To train the activity classifier, conditional
and joint probabilities of attributes and actions are obtained by generating
many synthetic activity occurrences in simulation, and measuring low-level
feature vectors such as distance and velocity between objects, similarity
of the object to each class category, and a noise-corrupted sequence
of object action classifications.