|
Logically, each SPU combines a camera with a local computer that processes the incoming video. Many types of sensors and SPUs have been incorporated into the VSAM IFD testbed system: a) color camera with active pan, tilt and zoom control; b) thermal sensor; c) a relocatable van; and d) an airborne sensor. In addition, two sensors from other groups have been successfully integrated: e) a Columbia-Lehigh omnicamera; f) a Texas Instruments indoor activity monitoring system. By using a pre-specified communication protocol, these systems were able to directly interface with the VSAM network
|
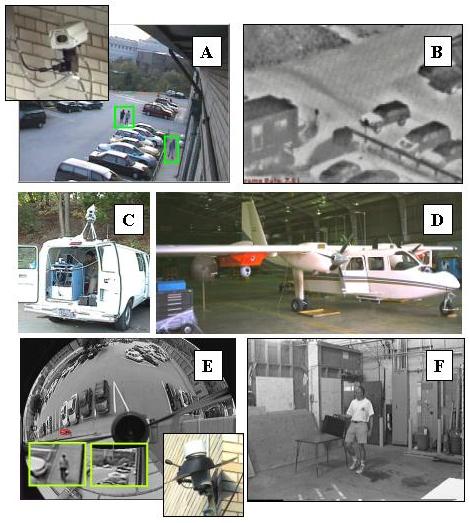 |
The relocatable van and airborne SPU warrant further discussion. The relocatable van SPU consists of a sensor and pan-tilt head mounted on a small tripod that can be placed on the vehicle roof when stationary. All video processing is performed on-board the vehicle, and results from object detection and tracking are assembled into symbolic data packets and transmitted back to the operator control workstation using a radio Ethernet connection. The major research issue involved in demonstrating the redeployable van involves rapid calibration of sensor pose after redeployment, so that object detection and tracking results can be integrated into the VSAM network (via computation of geolocation) for display at the operator control console.
The airborne sensor and computation
packages are mounted on a Britten-Norman Islander twin-engine aircraft
operated by the U.S. Army Night Vision and Electronic Sensors Directorate.
The Islander is equipped with a FLIR Systems Ultra-3000 turret that has
two degrees of freedom (pan/tilt), a Global Positioning System (GPS) for
measuring position, and an Attitude Heading Reference System (AHRS) for
measuring orientation. The continual self-motion of the aircraft
introduces challenging video understanding issues. For this reason,
video processing is performed using the Pyramid Vision Technologies PVT-200,
a specially designed video processing engine.
 |
|
The OCU also contains a site
model representing VSAM-relevant information about the area being monitored.
This includes both geometric and photometric information about the scene,
represented using a combination of image and symbolic data.
The OCU uses the site model to support a) object geolocation via intersection
of viewing rays with the terrain, b) visibility analysis (predicting what
portions of the scene are visible from what sensors) so that sensors can
be efficiently tasked, and c) specification of the geometric location and
extent of relevant scene features. For example, we might directly task
a sensor to monitor the door of a building, or to look for vehicles passing
through a particular intersection.
 |
 |

There are two independent communication protocols and packet structures supported in this architecture: the Carnegie Mellon University Packet Architecture (CMUPA) and the Distributed Interactive Simulation (DIS) protocols. The CMUPA is designed to be a low bandwidth, highly flexible architecture in which relevant VSAM information can be compactly packaged without redundant overhead. All communication between SPUs, OCUs and GUIs is CMUPA compatible. The CMUPA protocol specification document and code can be downloaded.
VIS nodes are designed to distribute
the output of the VSAM network to where it is needed. They provide symbolic
representations of detected activities overlaid on maps or imagery. Information
flow to VIS nodes is unidirectional, originating from an OCU. All
of this communication uses the DIS protocol, developed and used by the
Distributed Simulation community. An important benefit to keeping VIS nodes
DIS compatible is that it allows us to easily interface with synthetic
environment visualization tools such as ModSAF and ModStealth. See the
section on VSAM visualization.
| The backbone of the CMU campus VSAM system consists of six Sony EVI-370 color zoom cameras installed on PRB, Smith Hall, Newell-Simon Hall, Wean Hall, Roberts Hall, and Porter Hall. All have active pan, tilt and zoom control. Five of these units are mounted on Directed Perception pan/tilt heads, one is on a Sagebrush Technologies pan/tilt head. Two stationary fixed-FOV color cameras mounted on the peak of PRB facilitate work on activity analysis, classification, and sensor cuing. Three stationary fixed-FOV monochrome cameras mounted on the roof of Wean Hall are connected to the Operator Control Room over a single multimode fiber using a video multiplexor. A Raytheon NightSight PalmIR thermal (FLIR) sensor can also be mounted on Wean. A portable sensor unit was built to allow further software development and research at CMU in support of the DARPA Small Unit Operations (SUO) program. This unit consists of the same hardware as SPUs that were delivered to Fort Benning, Georgia in 1999. | 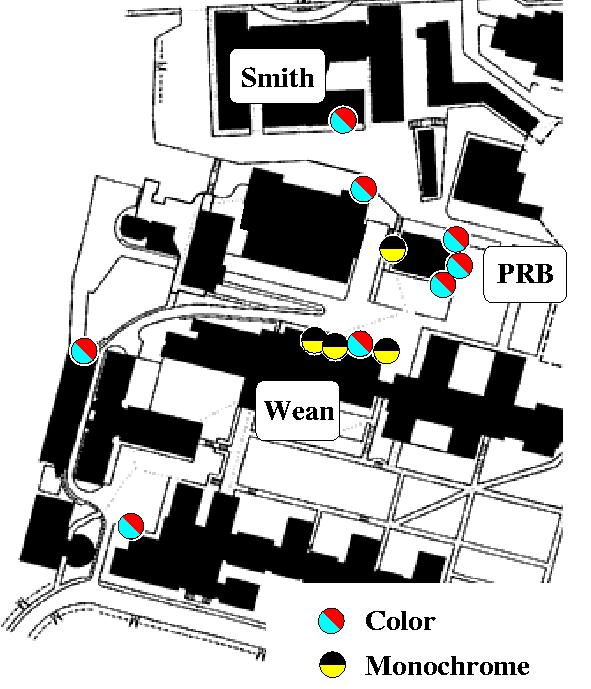 |
The Operator Control Room in PRB
houses the SPU, OCU, GUI and development workstations -- nineteen computers
in total. The four most recent SPUs are Pentium III 550 MHz computers.
Dagwood, a single ``compound SPU'', is a quad Xeon 550 MHz processor computer,
purchased to conduct research on classification, activity analysis, and
digitization of three simultaneous video streams. Also included in this
list of machines is a Silicon Graphics Origin 200, used to develop
video database storage and retrieval algorithms as well as designing user
interfaces for handling VSAM video data.
 |
|
Two auto tracking Leica theodolites
(TPS1100) are installed on the corner of PRB, and are hardwired to a data
processing computer linked to the VSAM OCU. This system allows us to do
real-time automatic tracking of objects to obtain ground truth for evaluating
the VSAM geolocation and sensor fusion algorithms. This data can
be displayed in real-time on the VSAM GUI. An Office of Naval Research
DURIP grant provided funds for two Raytheon NightSight thermal sensors,
the Quad Xeon processor computer, the Origin 200, an SGI Infinite
Reality Engine and the Leica theodolite surveying systems.
