|
Abstract
Outdoor scene classification
is challenging due to irregular geometry, uncontrolled illumination, and
noisy reflectance distributions. This paper discusses a Bayesian approach
to classifying a color image of an outdoor scene. A likelihood model factors
in the physics of the image formation process, the sensor noise distribution,
and prior distributions over geometry, material types, and illuminant spectrum
parameters. These prior distributions are learned through a training process
that uses color observations of planar scene patches over time. An iterative
linear algorithm estimates the maximum likelihood reflectance, spectrum,
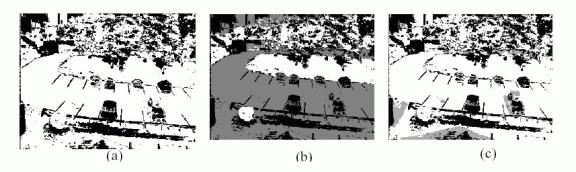
geometry, and object class labels for a new image. Experiments on images
taken by outdoor surveillance cameras classify known material types and
shadow regions correctly, and flag as outliers material types that were
not seen previously. |