|

|

Exploded View
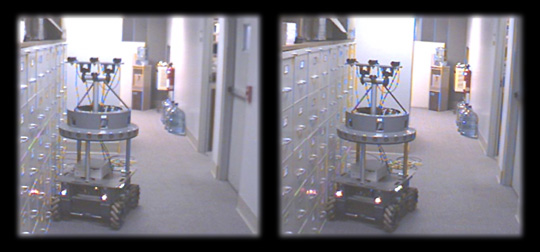
"Uranus"
1985An omni-directional mobile robot.
Using Mecanum wheels from Sweden.
|
Wireless.
Four wheel drive. 1 kW per motor. Four wheel independent suspension. 100 kg payload. |
Conceptual Design: Gregg Podnar Mechanical Design: Gregg Podnar Electrical Design: Gregg Podnar Power Elecctronics: Gregg Podnar Computing: Mike Blackwell |