Our goal is to design a fast and reliable computational sensor
which, given a task, provides useful information for coherent interaction
with the environment. Low-latency visual tracking of salient targets
in the field of view (FOV) is an important task in machine vision. Several
issues must be addressed: 1) the problem of selecting a target from the background,
2) the problem of maintaining the tracking engagement (i.e., target locking),
and 3) the problem of shifting tracking to new targets either when the presently
engaged feature leaves the FOV, or when the user or a host computer decides
to select and track another target in the FOV.
The problem of visual attention in biological systems concerns similar
issues: 1) select a salient location in the image, 2) transfer local data
from such a location to the higher processing stage, and 3) proceed by selecting
a new interesting location [11]. By selecting only relevant retinotopic information
in intermediate processing levels, the visual attention protects the limited
communication and processing resources from an information overload at higher
levels. However, Alport suggested that the need for attention goes beyond
protecting limited resources during complex object recognition: attention
is needed to ensure behavioral coherence. Namely, selective processing
is necessary in order to isolate parameters (e.g., target location, velocity,
size) for the appropriate action. For behavioral coherence, the following
requirements for attention are suggested [1]: 1) low latency requirement
— attentional system must operate in fast-changing environments; 2) locking
requirement—the appropriate attentional engagement has to be maintained
while action is executed; 3) purposive shift requirement—the system
must be able to override the attentional engagement when faced by environmental
threats or opportunities. The purposive shift requirement contradicts the
locking requirement, but humans and other species adopt a combination of
two partial solutions: 1) intentional shift—generate a shift based
on a range of heuristics and experiences; and 2) opportunistic shift
—elicit a shift in response to detecting a more “attractive” sensory cue.
The requirements for visual attention are analogous to requirements for
low-latency robust tracking. In fact, if the salient features for the tracking
device are also salient for the attentional system, the distinction between
the tracking and attention shifts fades. It is then permissible to speak
of our implementation as the implementation of a primitive sensory attention
system. The term sensory attention (as opposed to visual attention)
is used to emphasize the fact that the data selection in our sensor is performed
over the sensory signal, rather than over the retinotopic scene representation
in intermediate processing levels on which attention may operate in brains.
Our implementation of sensory attention meets both the low-latency requirement
and the locking requirement while providing mechanisms for both intentional
and opportunistic shifts. These features are weakly addressed in other recently
reported attention-related circuits. In one example, a one-dimensional array of cells
electrically receives a saliency map and uses delayed transient inhibition
at the selected location to model covert attentional scanning as suggested
by Koch and Ullman. The circuit mimics one aspect of the object recognition
process in which the attention roams across the conspicuous features of an
object (e.g., discontinuities, contours, etc.). However, it is questionable how this implementation would meet the low
latency requirement in fast-changing scenes; the attention may take a long
time, if ever, before it comes across the task-relevant target when
several equally salient (but not equally relevant) targets are in the FOV.
In, the reduced version of this circuit is used in a one-dimensional optical
tracking sensor which computes a saliency map on-chip, but has a weak mechanism
for ensuring a locking requirement with complex scenes. Both designs inherently
implement the opportunistic shifts, but neither provides the mechanism for
the intentional shifts.
A winner-take-all
circuit is responsible for selecting a salient feature and reporting the
location of the attention. The location of the attention is global information which is
reported as the output. The location of the attention is also used
internally to adapt the attention to meet the
locking requirement.
In practical applications, there are often several targets in the
scene. The target of interest is not necessarily the strongest or the most
salient. We
need to direct the sensor's attention toward that target. Once the
target is selected, we need a mechanism that will lock and track
the target while the target is of interest and/or a perceptually
guided goal is being executed. Recalling the analogy with the
visual attention, the selection mechanism corresponds to
opportunistic attention shifts initiated by "telling" the observer
where to "look," while the locking mechanism meets the locking
requirement and maintains attention engagement under motion.
 Our implementation solves these issues by inhibiting a portion of
the saliency map, thus restricting the activity of the WTA circuit
to a programmable active region--a subset of the array. The active
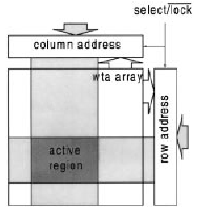
region is programmed by appropriate row and column addressing. There are two modes of operation: 1) select mode and 2)
lock mode. In the select mode, the active region is
user-defined by the external addressing (see figure on the right) . The active
region is of arbitrary size and location. The target selected by
the paradigm is the absolute maximum within this region.
Our implementation solves these issues by inhibiting a portion of
the saliency map, thus restricting the activity of the WTA circuit
to a programmable active region--a subset of the array. The active
region is programmed by appropriate row and column addressing. There are two modes of operation: 1) select mode and 2)
lock mode. In the select mode, the active region is
user-defined by the external addressing (see figure on the right) . The active
region is of arbitrary size and location. The target selected by
the paradigm is the absolute maximum within this region.
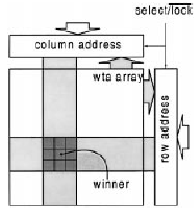 In lock
mode, the sensor itself dynamically defines a small (e.g., 3x3 in our implementation) active region centered at the most recent
location of the target (see figure on the left). The select mode directs the
attention toward a feature that is useful for the task at hand.
For example, a user may want to specify an initial active region,
aiding the sensor in attending to the relevant local peak in the
scene. Then, the lock mode is enabled for locking onto the
selected feature. In the lock mode, the 3x3 cell active region is
centered at the location of current attention target. If the
target moves, one of the eight active neighbors in the WTA array
will receive the winning intensity peak and automatically update
the position of the 3x3 active region. It is now clear that the
salient target is not necessarily the peak of the absolute maximum
intensity in the image. The ability of the sensor to define its
own active region is an example of the top-down sensory adaptation
presently missing in conventional machine vision systems.
In lock
mode, the sensor itself dynamically defines a small (e.g., 3x3 in our implementation) active region centered at the most recent
location of the target (see figure on the left). The select mode directs the
attention toward a feature that is useful for the task at hand.
For example, a user may want to specify an initial active region,
aiding the sensor in attending to the relevant local peak in the
scene. Then, the lock mode is enabled for locking onto the
selected feature. In the lock mode, the 3x3 cell active region is
centered at the location of current attention target. If the
target moves, one of the eight active neighbors in the WTA array
will receive the winning intensity peak and automatically update
the position of the 3x3 active region. It is now clear that the
salient target is not necessarily the peak of the absolute maximum
intensity in the image. The ability of the sensor to define its
own active region is an example of the top-down sensory adaptation
presently missing in conventional machine vision systems.
We implemented
the Sensory Attention in the Tracking
Sensor.