Repulsive Shells
ACM Transactions on Graphics 2024
Best Paper Award
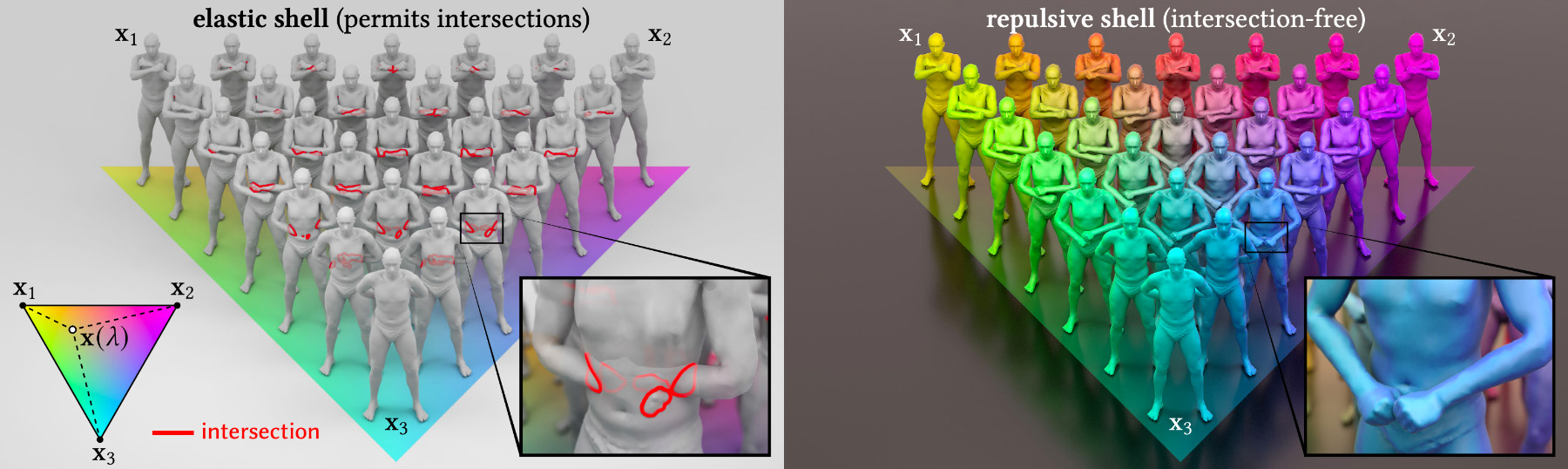
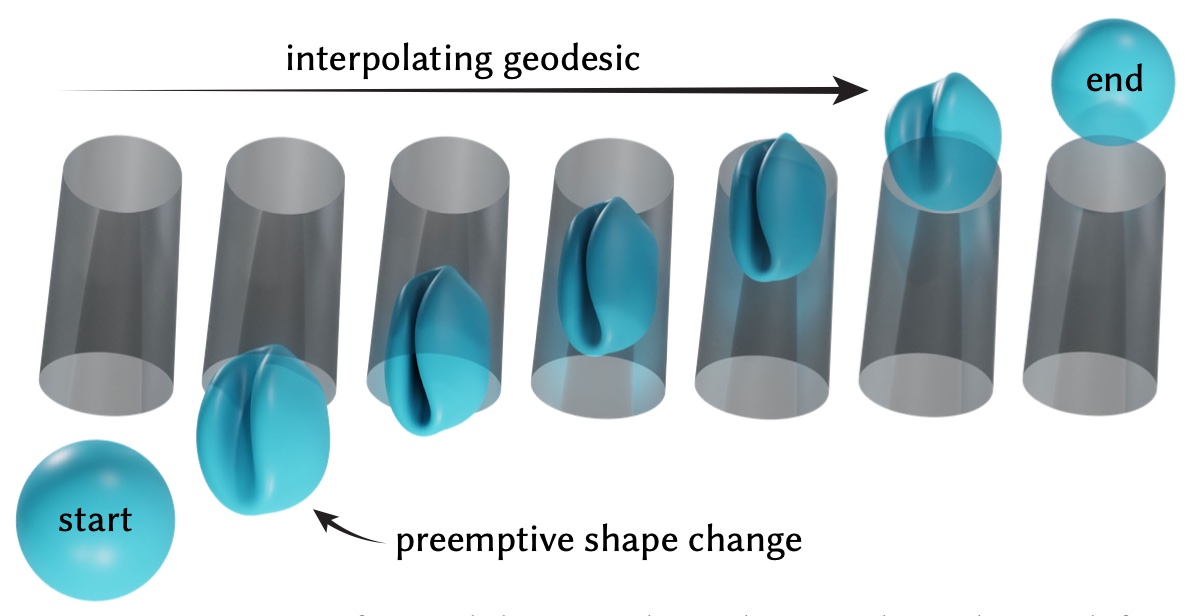
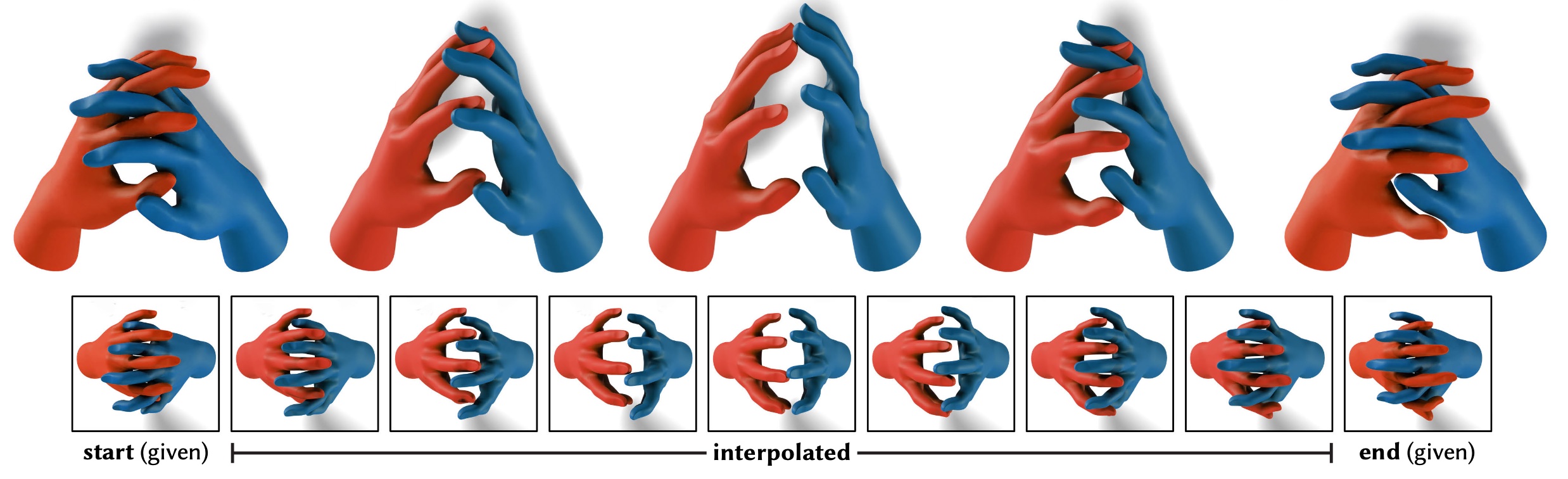
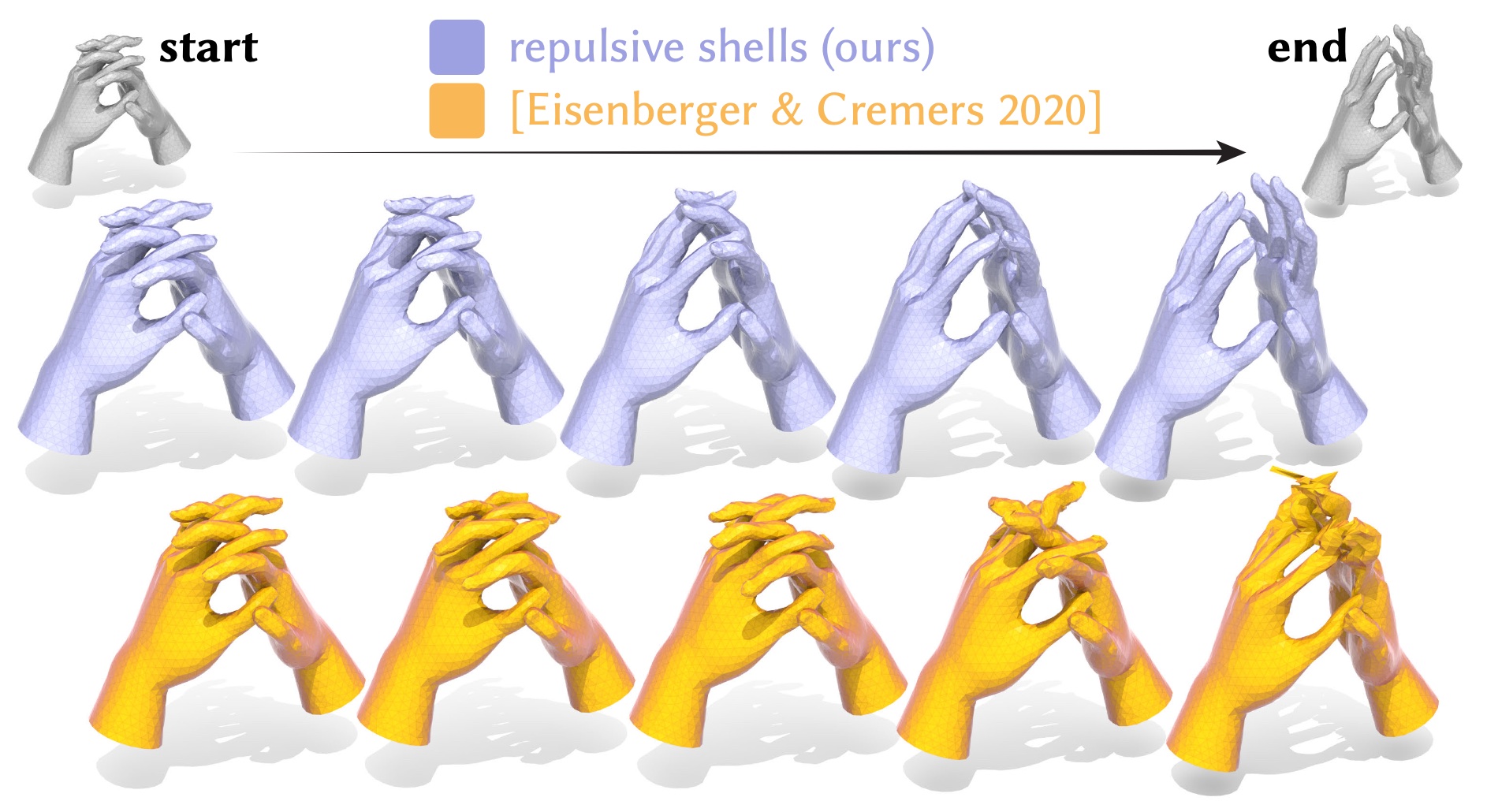
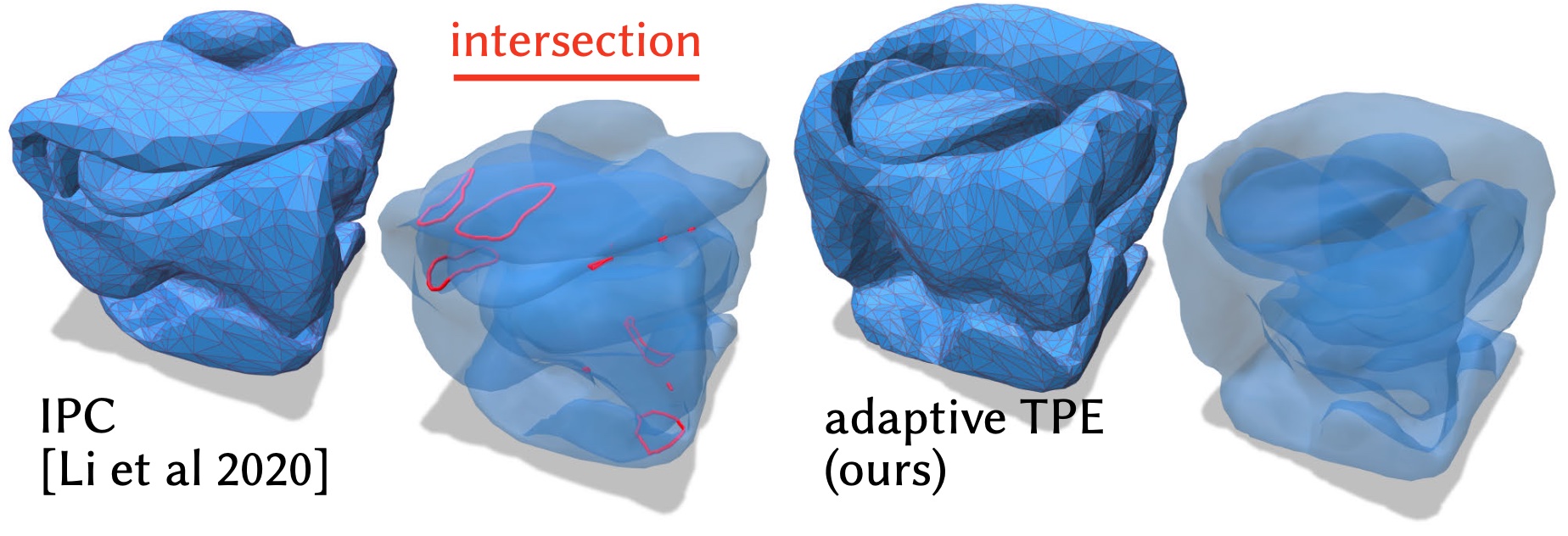
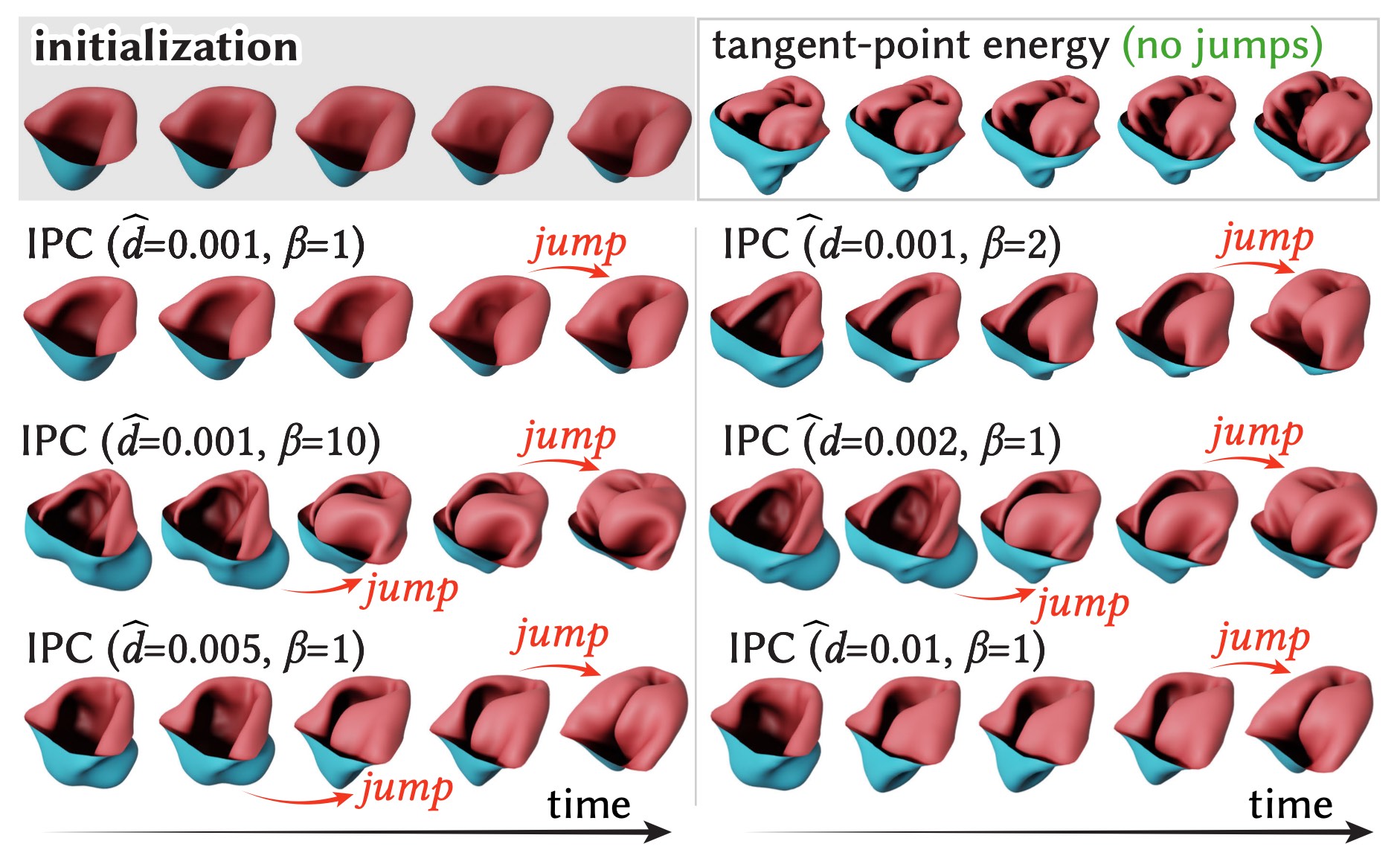
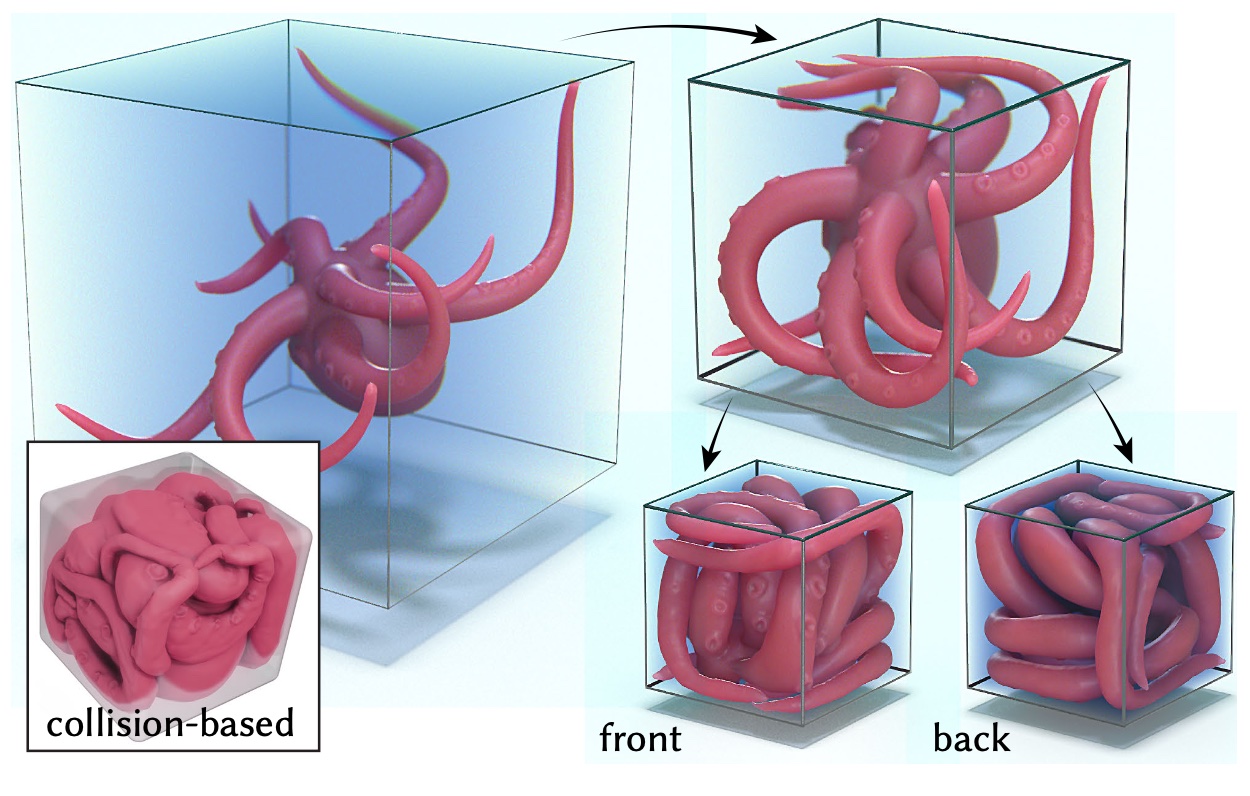
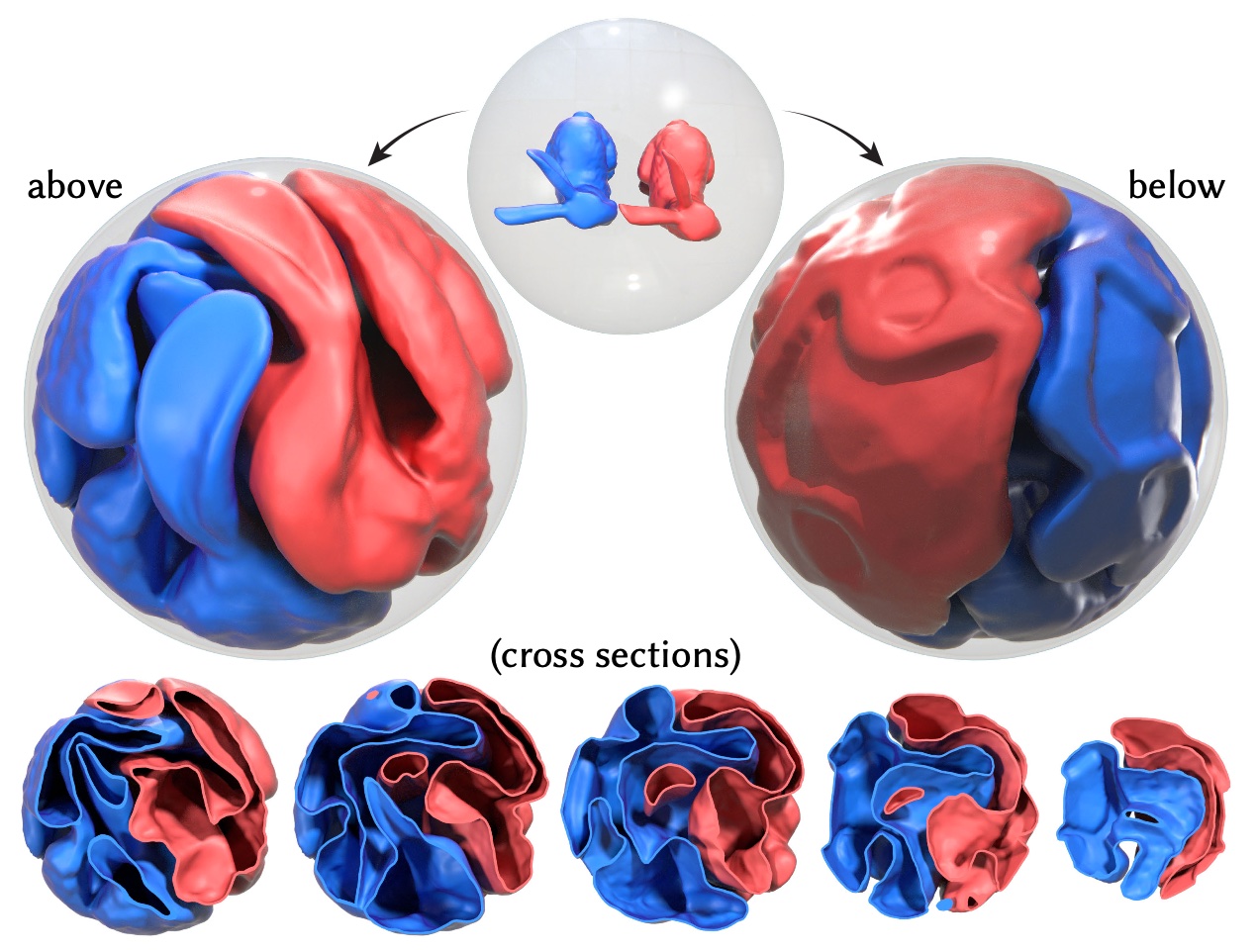
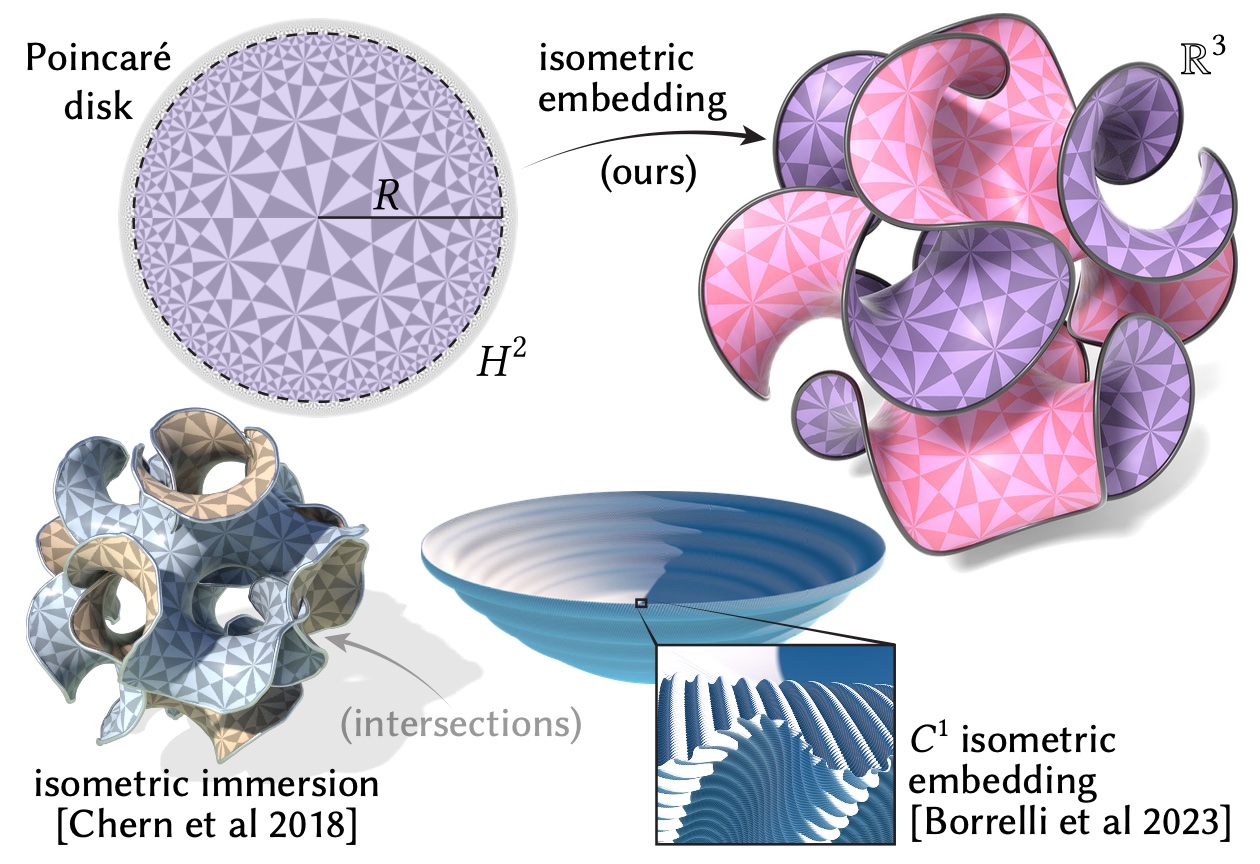
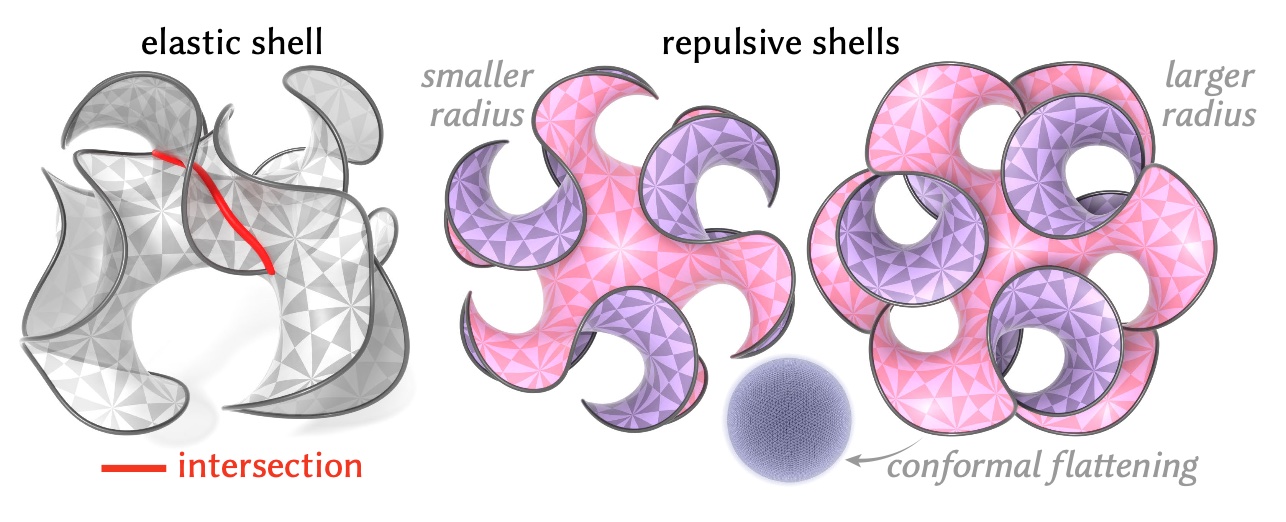
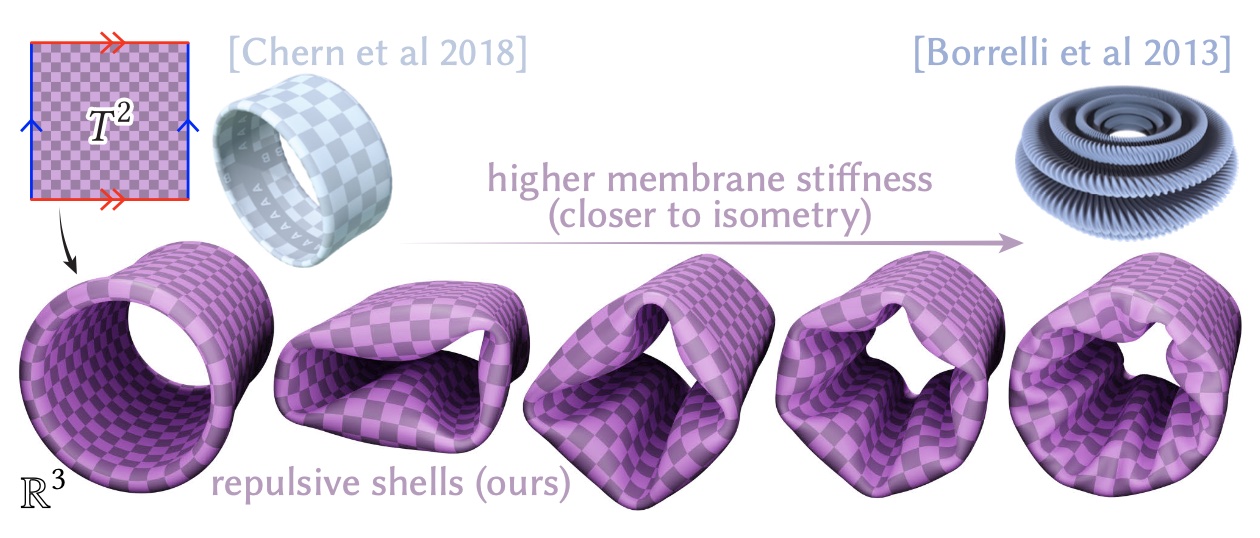
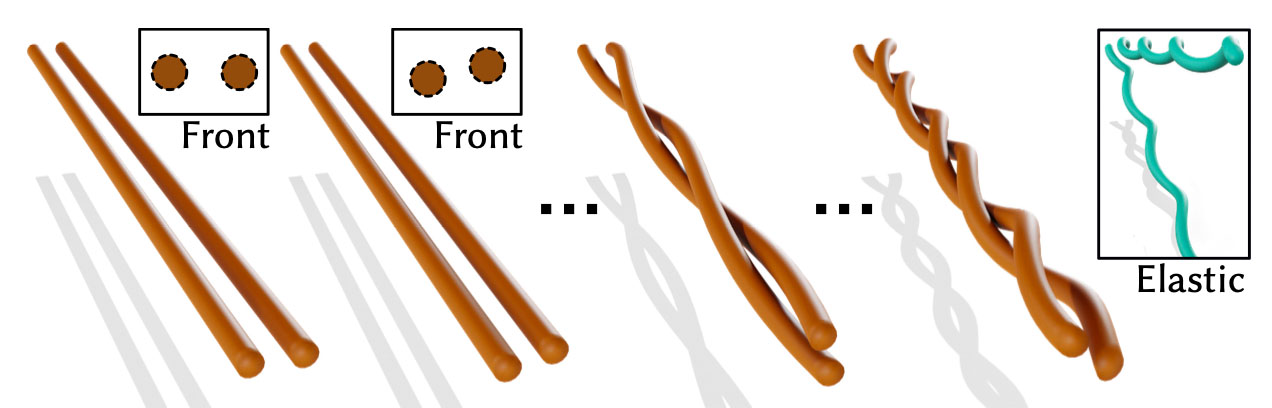
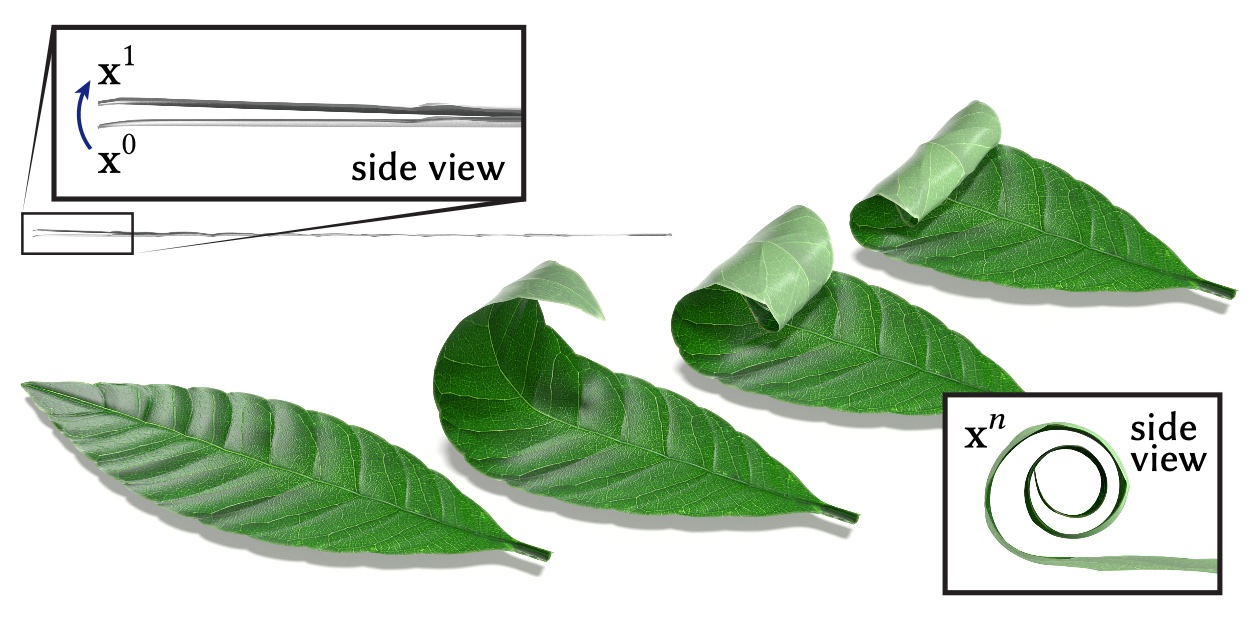
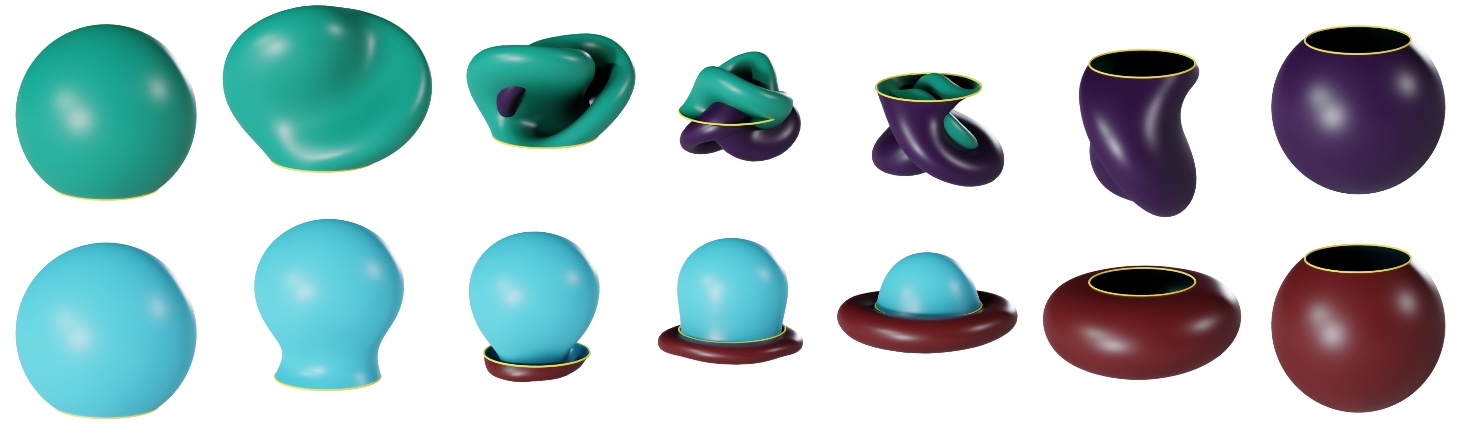
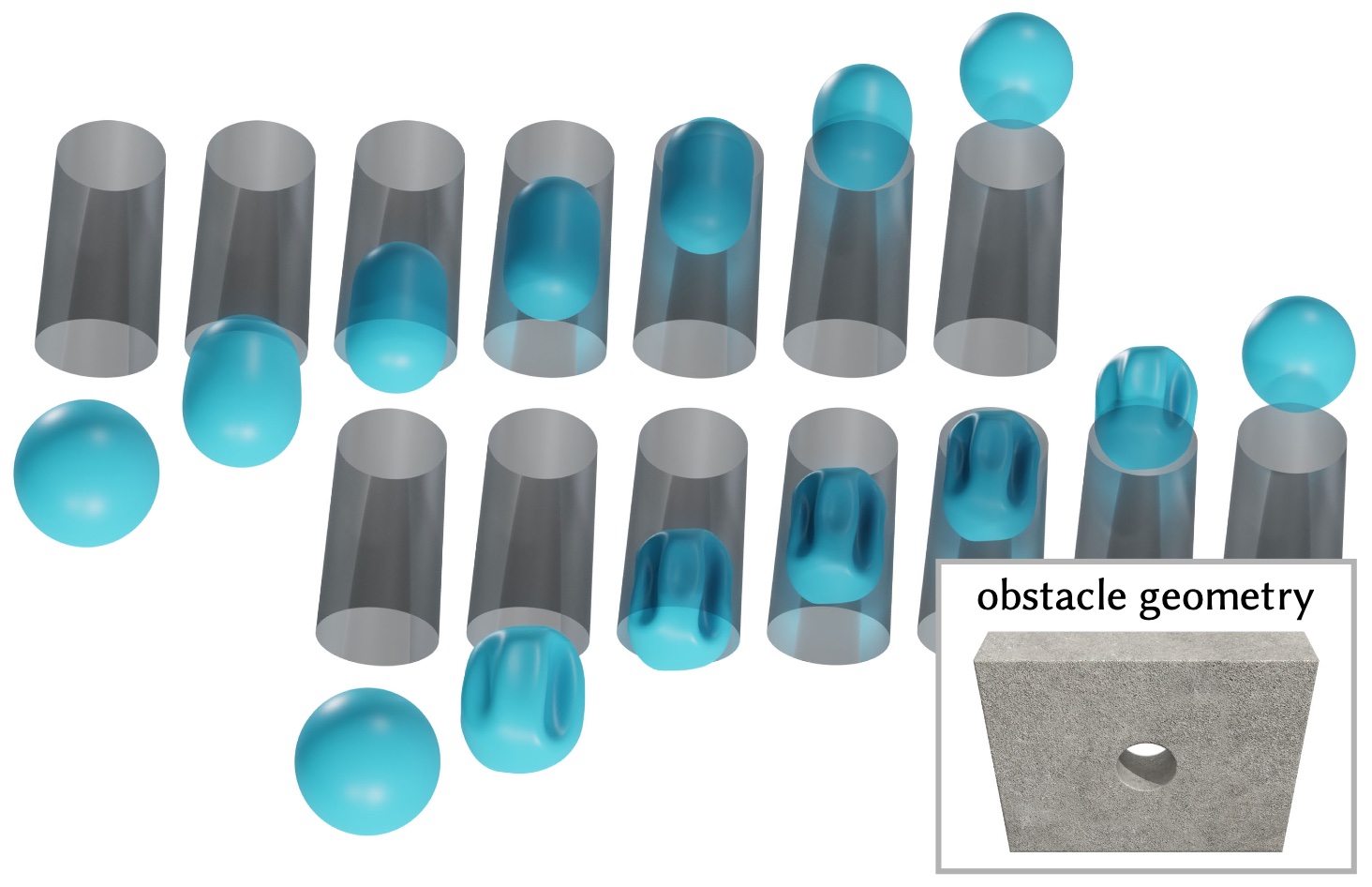
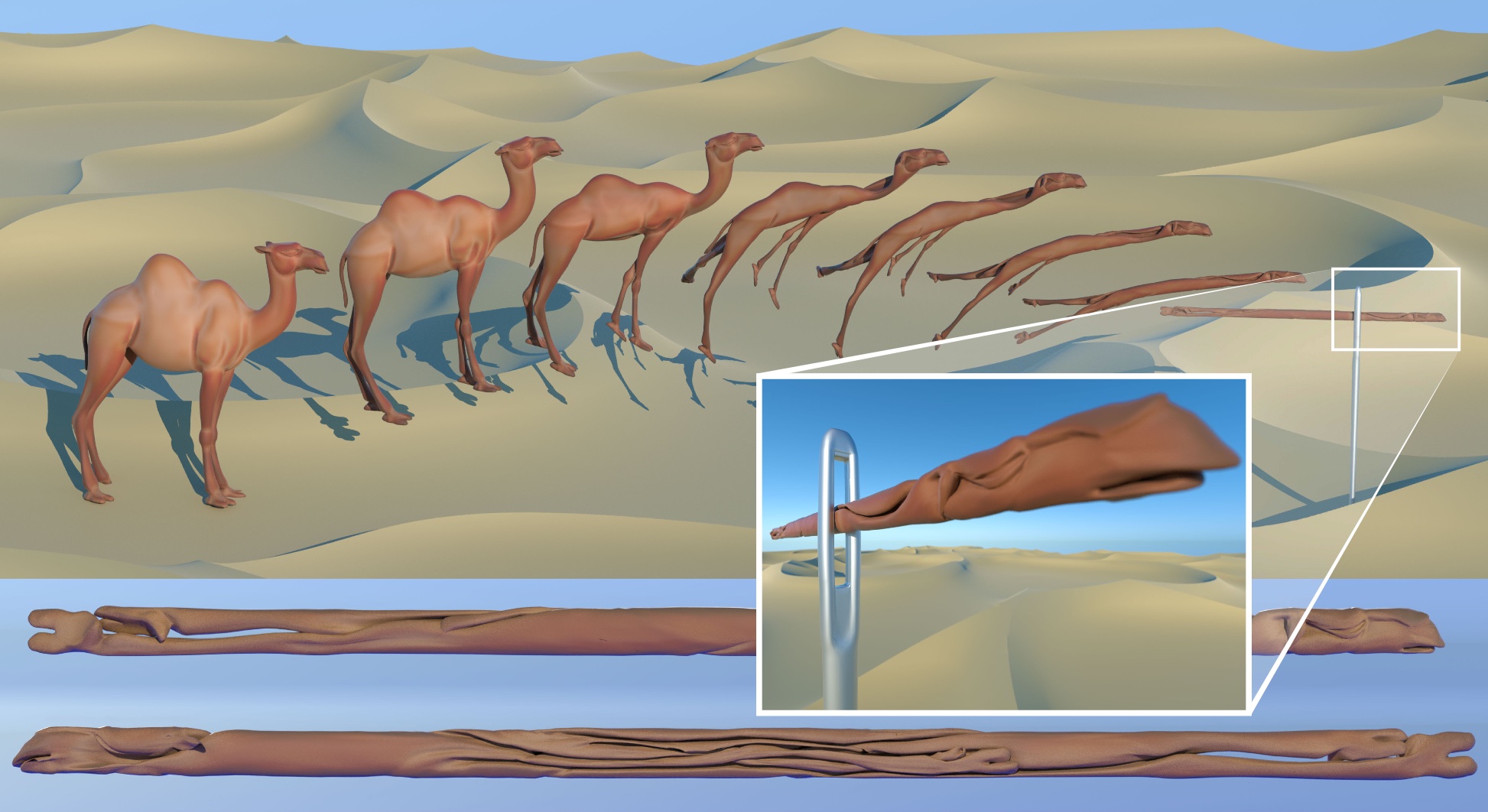
This paper develops a shape space framework for collision-aware geometric modeling, where basic geometric operations automatically avoid interpenetration. Shape spaces are a powerful tool for surface modeling, shape analysis, nonrigid motion planning, and animation, but past formulations permit nonphysical intersections. Our framework augments an existing shape space using a repulsive energy such that collision avoidance becomes a first-class property, encoded in the Riemannian metric itself. In turn, tasks like intersection-free shape interpolation or motion extrapolation amount to simply computing geodesic paths via standard numerical algorithms. To make optimization practical, we develop an adaptive collision penalty that prevents mesh self-intersection, and converges to a meaningful limit energy under refinement. The final algorithms apply to any category of shape, and do not require a dataset of examples, training, rigging, nor any other prior information. For instance, to interpolate between two shapes we need only a single pair of meshes with the same connectivity. We evaluate our method on a variety of challenging examples from modeling and animation.

PDF, 25MB
Video
This work was supported by the Deutsche Forschungsgemeinschaft (German Research Foundation) via project 212212052, project 211504053 – Collaborative Research Center 1060, and Germany’s Excellence Strategy project 390685813 – Hausdorff Center for Mathematics, an NSF CAREER Award (IIS 1943123), NSF Award IIS 2212290, a Packard Fellowship, the German-Israeli Foundation for Scientific Research and Development (grant number I-1339-407.6/2016), and gifts from Facebook Reality Labs, and Google, Inc. Furthermore, this project has received funding from the European Union’s Horizon 2020 research and innovation program under the Marie Skłodowska-Curie grant agreement No 101034255.
Mesh diagrams were created with Penrose.
@article{Sassen:2024:RS,
author = {Sassen, Josua and Schumacher, Henrik and Rumpf, Martin and Crane, Keenan},
title = {Repulsive Shells},
journal = {ACM Trans. Graph.},
volume = {43},
number = {4},
year = {2024},
publisher = {ACM},
address = {New York, NY, USA},
}