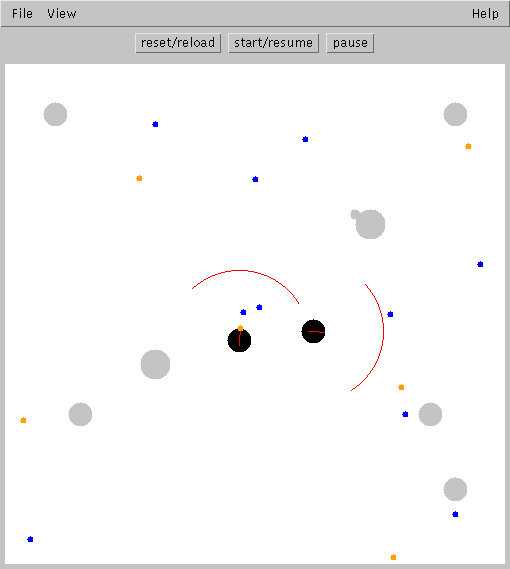
Two simulated Nomad 150 robots search for objects to collect and return to the homebase (center of the field). There are two types of objects to collect: moving simulated squiggle balls and stationary blue balls. It is very hard to catch the squiggle balls.