|
15-494 Cognitive Robotics Spring 2009 |
|
|
|
15-494 Cognitive Robotics Spring 2009 |
|
Part I: Visual Routines in the Simulator Create a ~/project/images directory and download the file ttt6.png to that directory. (The image at
right is an RGB version; click on it to see the YUV.) Since this is a
PNG file, Tekkotsu expects it to be in YUV format instead of RGB. YUV
format allows more accurate color segmentation, and can be used with
the standard threshold file 7general.tm.
Create a ~/project/images directory and download the file ttt6.png to that directory. (The image at
right is an RGB version; click on it to see the YUV.) Since this is a
PNG file, Tekkotsu expects it to be in YUV format instead of RGB. YUV
format allows more accurate color segmentation, and can be used with
the standard threshold file 7general.tm.Type in the program from the visual routines lecture notes that finds the orange blob closest to the largest blue blob (examples 2 and 3), but change orange to pink. What does findMinPlus() do? Where can you find the
documentation for it in the Tekkotsu Reference section? (Hint: go to
the DualCoding library sub-documentation from the main Reference page,
and then click on the Class Members tab, then select "f".)Although we'll be running Tekkotsu on the workstation instead of on the Chiara, it's the same code, so just enter your behavior in UserBehaviors.h and type "make" to compile. Then type "./tekkotsu-CHIARA" to run Tekkotsu on your workstation. To get the simulator to load images from disk instead of a camera, type the following commands to the Tekkotsu console: Start up a ControllerGUI, but instead of giving a robot name as the argument, use "localhost" to connect to the simulator. Then run your behavior, and click on "C" in the ControllerGUI to launch the camera space SketchGUI. Click on items in the SketchGUI derivation tree to see the corresponding sketch. Use control-click to view several items at once.set Drivers.Logged.Path=images set Vision.Source=Logged Part II: Solving Problems with Sketch PrimitivesFor each problem, write code using only sketch primitives (not shape primitives) to solve it. You may want to review the documentation for the Sketch primitives and the visops namespace. Note: the images below appear dark because the camera gain was set low. This reduces specular reflection and makes the images easier to segment. Note: when you have multiple image files in your project/images directory, the simulator will cycle through them at 30 frames per second. To prevent this, use the "freeze" command. Then, when you want to advance to the next image, use the "advance" command. Stop your behavior and start it again to pick up the new image. Your answers to Parts II and III should be turned in as Homework 3, due Friday, Feb. 6. Counting
Figure out whether there are more blue blobs or more pink blobs in each
image, and display the blobs of the more numerous type. To "display"
your result, construct a Sketch<bool> called
result
that contains only the desired blobs.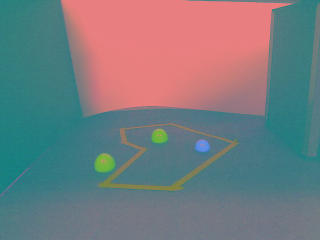 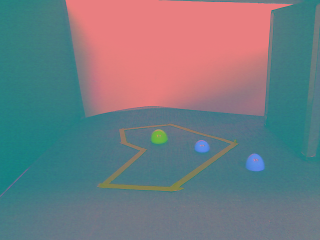 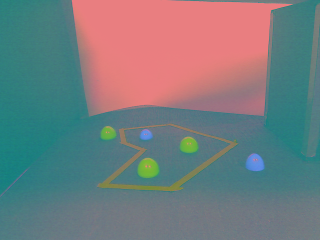 Containment
Which pink blob appears inside the closed curve in the images above?
Note: you will want to use visops::fillInterior to find the interior of
the curve.
Judging Distance
Solve this problem on the robot instead of the simulator. Which of
two easter eggs is closer? Choose two easter eggs of different colors
and place them in front of the Chiara in one of three arrangments:
pink one closer, blue one closer, or both roughly the same. The
Chiara should judge which of the three conditions it is seeing based
on the number of colored pixels for each of the two eggs. It should
make a different sound for each of the three cases.
Free Style
Make up an interesting geometric question of your own about any of the
above images, and show how to solve it using visual
routines.
Part III. Vision on the Robot
From now on, whenever you first boot a robot and start to use it, you
should begin by running the "gettekkotsu" script to load the latest
copy of the Tekkotsu libraries. You only have to do this at the start
of your session. Once you've updated your robot for the day, you can
use the "getmycode" script to upload your code as often as you
wish.
Shell Game
Set up a Shell Game for the Chiara to play. Using 3 easter egg
halves, hide a pice of tape under one of the eggs. The Chiara should
point the arm at one of the three eggs (left, middle, or right).
Then, when you remove the egg, the Chiara should make a happy noise if
it wins (sees the tape) or a sad noise if it loses (no tape). To pick
an egg at random, use a RandomTrans transition. To point the arm at a
specific place, use an ArmNode to set the shoulder, elbow, and wrist
joint angles directly. (We'll learn more sophisticated ways to move
the arm later, when we cover kinematics.) Your behavior can assume
that the eggs will be in fixed positions corresponding to the left,
middle, and right thirds of the camera image, so it doesn't need to
search for them. To select one third of the camera image, you'll want
to make a Sketch<bool> to use as a mask. You can use a for loop
to set the bits you want.
Dave Touretzky and Ethan Tira-Thompson |