Homework 11
16-311 Introduction to Robotics
Prof. Howie Choset
Objectives:
- Build up the basic concepts of inverse kinematics
- Understand the limitations of motion based on given mechanical systems
- Derive the inverse kinematics for the following
prismatic-revolute-revolute joint planar robot. Explicitly state what and when there
are infinite, one, or no solutions.
Assume s can range from zero to infinity; the revolute
joints can range from zero to 2 pi; and the first link is longer than
the second link. (7pts)
- Sketch the workspace of the arm. (5pts)
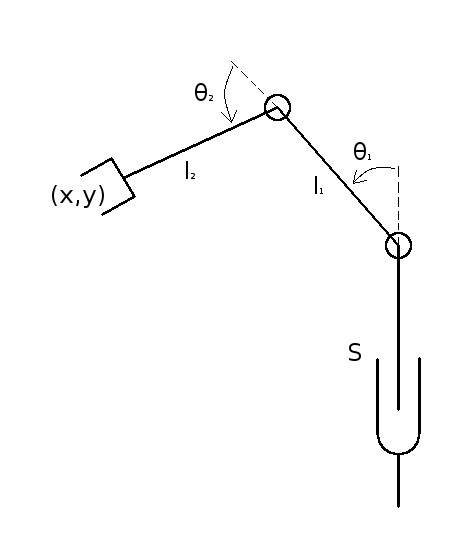
Robotic arm for questions 1 and 2.
- Derive the inverse kinematics for the following
revolute-revolute-revolute joint planar robot. Explicitly state what and when there
are infinite, one, or no solutions.
Assume the revolute
joints can range from zero to 2 pi; and the links sizes are ordered as L1 < L2 < L3. (10pts)
- Sketch the workspace of the arm. (3pts)
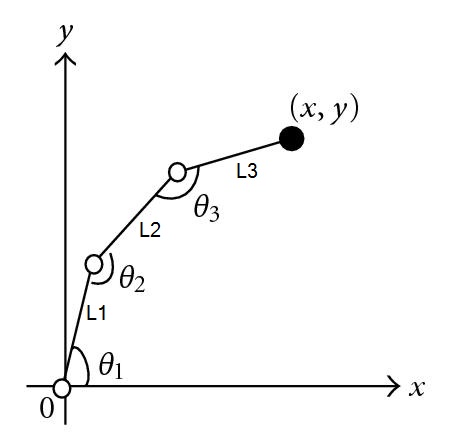
Robotic arm for questions 3 and 4.
Turn in:
Submit a PDF named [andrewID_hw11.pdf] to Gradescope before the beginning of class (4/18).
Last updated 4/17/2016 by Shucheng Chao