15-494 Cognitive Robotics 2008 Final Project
Sheep Herding
Christopher Solidum
Goals Boundary Detection Manipulation Results Future Work
The first major part of my project was finding the boundaries of the sheep’s pen and determining what’s inside it.
There were several different methods available to detect the boundaries of the sheep’s pen.
Method 1: Use the MapBuilder to find all the pink lines in the area, then use the PolygonData constructor to build the boundaries
Advantages:
- Fast
- Simple to compute
- Relatively long range
Disadvantages:
- Hard to order the lines to create the correct boundary
Method 2: Use the MapBuilder to find all the pink lines in the area, then form the boundary based on the intersections of the lines
Advantages:
- Relatively long range
Disadvantages:
-Complicated to find which lines are supposed to intersect with each other
Current Method: Use MapBuilder to find all the pink lines in the area, then construct boundaries by summing together the halfplanes of all the lines
Advantages:
- Relatively simple
- Robust against noise
Disadvantages:
- Requires us to significantly reduce the resolution of the local sketch space
- Only valid within a certain range
The Algorithm:
Use the MapBuilder to find pink lines
For Each Line
If the line is Vertical
If more lines are below it than above
Render bottom half plane
Else
Render Top half plane
Else
If more lines are to the right of it than to the left
Render right half plane
Else
Render left half plane
Sum together all the renderings to create the inside of the sheep pen
Use PolygonData::convexHull to create the bounding polygon
Boundary: 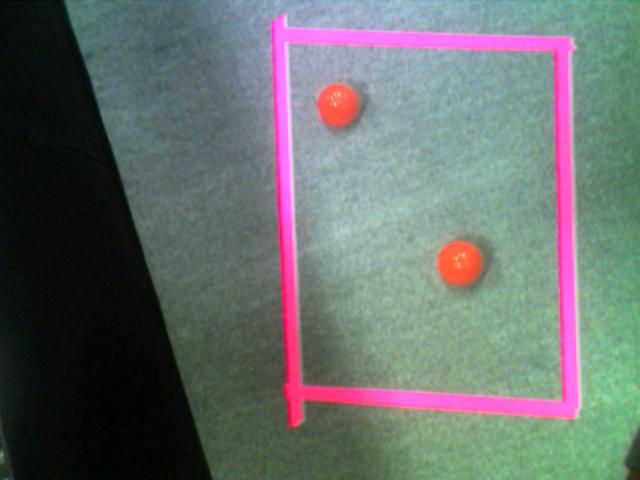
Sketch:
Insides
Detecting Inside:
In order to detect if the an easter egg is out of place, the AIBO performs the PolygonData::isInside function using the bounding polygon and the center of the esater egg. It then performs a color check to see if its out of place.
Easter egg Inside:

Patrolling:
Given that there are no easter eggs (sheep) out of place, the AIBO will patrol around the boundary. This is done by finding the second closest line (based on line center) and moves to that point using the pilot. The AIBO repeats this until it finds an easter egg out of place. Videos of the AIBO Patroling can be seen on the results page.