- A walk around the unfinished vehicle
- A walk around the vehicle with cowlings
- John D. demonstrates the vehicle's offroad capabilities
- Kiran sitting on Lewis testing the sidewalk-following algorithm. John H. accompanying ATV with safety leash.
- John D. maneuvers Lewis out of the Highbay.
- John H. races the ATV behind Wean Hall.
- Lewis on and off the road.
- Lewis and the Gang ride off into the sunset.
-
The Finished Vehicles
- Lewis & Clark
- Lewis
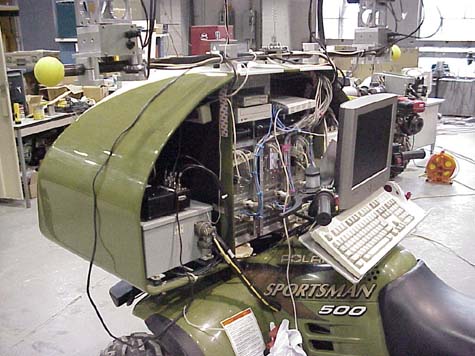
- Front of the Vehicle
- Another shot of the ATV
- Back of ATV (at an angle)
- Vehicle Cockpit
- Vehicle Cockpit (at an angle)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
-
Under the Hood
- The bare vehicle in the Highbay
- The bare vehicle on Flagstaff Hill
- Full frontal view of naked vehicle
- Members of the group admire Clark's wheel
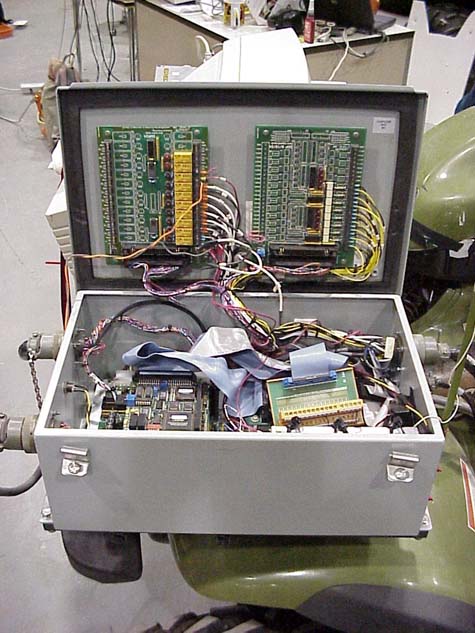
- Housing for the PC/104 and I/O ports
- The stereo camera configuration
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
-
Perception for Surveillance
- Illustrative example of correspondence using Differential Discriminative Diagnosis
- A simple example of retreiving similar images from a database
{kind=link}
{kind=link}
-
Perception for Mobility
- Main Step of Stereo Processing
- Transferring Input Image to Occupancy Grid
- Obstacle Detection Algorithm Block Diagram
- Results of Obstacle Detection using HSI-Based Segmentation
{kind=link}
{kind=link}
{kind=link}
{kind=link}
-
CyberARIES
- Coming soon to a browser near you.
-
Vehicular Control
- CyberATV Systems Hardware Architecture
- Block Diagram of CyberATV Actuation Systems
- CyberATV with Labeled Sensor Suite
- Block Diagram of CyberATV Control Architecture (NOT AVAILABLE)
- Vehicular Control Block Diagram
- Block Diagram for CyberATV Steering Controller
- Steering Responses for Calibrating Steering Angle
- CyberATV Steering Response for Fuzzy PD Steering Controller
- Block Diagram of Speed Controller
- CyberATV Speed Response for Adaptive Fuzzy Throttle Controller
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
- Christopher P. Diehl, Mahesh Saptharishi, John B. Hampshire II, and Pradeep K. Khosla. Collaborative Surveillance Using Both Fixed and Mobile Unattended Ground Sensor Platforms. in AeroSense '99. SPIE. Orlando, Florid. 1999. [pdf]
- A. Trebi-Ollennu and John M. Dolan, Adaptive Fuzzy Throttle Control for an All Terrain Vehicle. Institute for Complex Engineered Systems, Carnegie Mellon University. 1999. [pdf]
- John M. Dolan, A. Trebi-Ollennu, Alvaro Soto and Pradeep Khosla. Distributed Tactical Surveillance with ATVs, Forthcoming in Proceedings of SPIE, Vol. 3693 AeroSense, Orlando, FL. April 1999. [pdf]
- A. Trebi-Ollennu and John M. Dolan. An Autonomous Ground Vehicle for Distributed surveillance: CyberScout Internal Report. Institute for Complex Engineered Systems, Carnegie Mellon University. April 1999. [pdf]
-
Kevin Dixon, John M. Dolan, Robert Grabowski, John Hampshire, Wesley Huang, Christiaan Paredis, Jesus Salido, Mahesh Saptharishi, and Pradeep Khosla. RAVE: A Real and Virtual Environment for Multiple Robot Systems. IROS '99. 1999.
- CyberATV Flier (coming soon)
- K2T, Inc. 9702 Robot ATV. K2T Report. 1997.
- C.S. Oliver. CyberATV Poster. Institute for Complex Engineered Systems. May 1999. [pdf]
-
All Team member Visages (ATV)
- John Dolan
- John Hampshire
- Ashitey Trebi-Ollennu
- Pradeep Khosla
- Kiran Bhat
- Brian Boylston
- Chris Diehl
- Al Grupe
- Ben Pugliese
- Spence Oliver
- Mahesh Saptharishi
- Marios Savvides
- Alvaro Soto
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}