Although this work is aimed at giving a general comparison of
heuristics for belief space planning, we also present a comparison
of the best heuristics within CAltAlt and ![]() to some of the
other leading approaches to conformant planning. Table
7 lists several features of the evaluated
planners, such as their search space, their search direction,
whether they are conditional, the type of heuristics, and the
implementation language. Note, since each approach uses a different
planning representation (BDDs, GraphPlan, etc.), not all of which
even use heuristics, it is hard to get a standardized comparison of
heuristic effectiveness. Furthermore, not all of the planners use
PDDL-like input syntax; MBP, and KACMBP use AR encodings which may
give them an advantage in reducing the number of literals and
actions. We gave the MBP planners the same grounded and filtered
action descriptions that we used in CAltAlt and
to some of the
other leading approaches to conformant planning. Table
7 lists several features of the evaluated
planners, such as their search space, their search direction,
whether they are conditional, the type of heuristics, and the
implementation language. Note, since each approach uses a different
planning representation (BDDs, GraphPlan, etc.), not all of which
even use heuristics, it is hard to get a standardized comparison of
heuristic effectiveness. Furthermore, not all of the planners use
PDDL-like input syntax; MBP, and KACMBP use AR encodings which may
give them an advantage in reducing the number of literals and
actions. We gave the MBP planners the same grounded and filtered
action descriptions that we used in CAltAlt and ![]() . We also
tried, but do not report results, giving the MBP planners the full
set of ground actions without filtering irrelevant actions. It
appears that the MBP planners do not use any sort of action
pre-processing because performance was much worse with the full
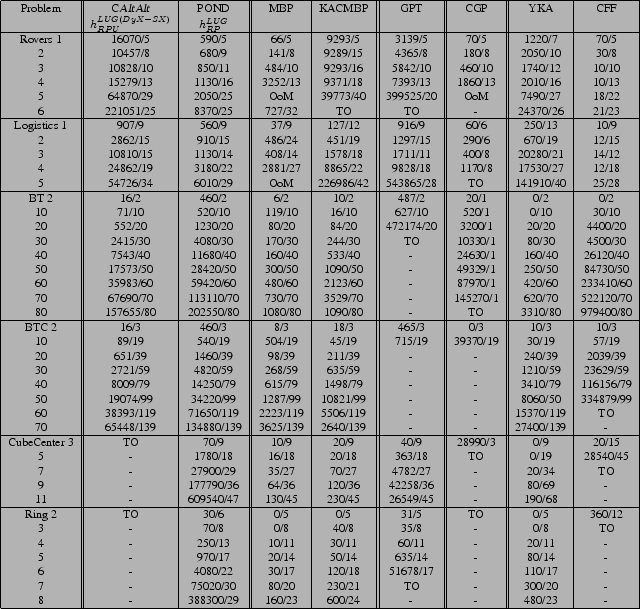
grounded set of actions. Nevertheless, Table 8 compares
MBP, KACMBP, GPT, CGP, YKA, and CFF with
. We also
tried, but do not report results, giving the MBP planners the full
set of ground actions without filtering irrelevant actions. It
appears that the MBP planners do not use any sort of action
pre-processing because performance was much worse with the full
grounded set of actions. Nevertheless, Table 8 compares
MBP, KACMBP, GPT, CGP, YKA, and CFF with
![]() in
CAltAlt and
in
CAltAlt and
![]() in
in ![]() with respect to run time and
plan length.
with respect to run time and
plan length.
|
MBP: The MBP planner uses a cardinality heuristic that in many
cases overestimates plan distances (as per our implementation with
![]() ). MBP uses regression search for conformant plans, but
progression search for conditional plans. It is interesting to note
that in the more difficult problem instances in the Rovers and
Logistics domains MBP and KACMBP tend to generate much longer plans
than the other planners. MBP does outperform
). MBP uses regression search for conformant plans, but
progression search for conditional plans. It is interesting to note
that in the more difficult problem instances in the Rovers and
Logistics domains MBP and KACMBP tend to generate much longer plans
than the other planners. MBP does outperform ![]() in some cases
but does not find solutions in certain instances (like Rovers 5),
most likely because of its heuristic. We note that KACMBP and MBP
are quite fast on the Cube Center and Ring domains, but have more
trouble on domains like Rovers and Logistics. This illustrates how a
heuristic modeling knowledge as opposed to reachability can do well
in domains where the challenge is uncertainty not reachability.
in some cases
but does not find solutions in certain instances (like Rovers 5),
most likely because of its heuristic. We note that KACMBP and MBP
are quite fast on the Cube Center and Ring domains, but have more
trouble on domains like Rovers and Logistics. This illustrates how a
heuristic modeling knowledge as opposed to reachability can do well
in domains where the challenge is uncertainty not reachability.
Optimal Planners: The optimal approaches (CGP and GPT) tend not
to scale as well, despite their good solutions. CGP has trouble
constructing its planning graphs as the parallel conformant plan
depth increases. CGP spends quite a bit of time computing mutexes,
which increases the planning cost as plan lengths increase. CGP
does much better on shallow and parallel domains like BT, where it
can find one step plans that dunk every package in parallel.
GPT performs progression search that is guided by a heuristic that measures the cost of fully observable plans in state space. GPT finds optimal serial plans but is not as effective when the size of the search space increases. GPT fails to scale with the search space because it becomes difficult to even compute its heuristic (due to a larger state space as well).
YKA: YKA, like CAltAlt is a regression planner, but the
search engine is very different and YKA uses a cardinality
heuristic. YKA performs well on all the domains because of its
search engine based on BDDs. We notice a difference in progression
and regression by comparing ![]() to YKA, similar to trends found
in the comparison between
to YKA, similar to trends found
in the comparison between ![]() and CAltAlt. Additionally, it
seems YKA has a stronger regression search engine than CAltAlt.
and CAltAlt. Additionally, it
seems YKA has a stronger regression search engine than CAltAlt.
![]() is able to do better than YKA in the Rovers and Logistics
domains, but it is unclear whether that it is because of the search
direction or heuristics.
is able to do better than YKA in the Rovers and Logistics
domains, but it is unclear whether that it is because of the search
direction or heuristics.
CFF: Conformant FF, a progression planner using a relaxed plan
similar to the ![]() relaxed plan, does very well in the Rovers and
Logistics domains because it uses the highly optimized FF search
engine as well as a cheap to compute relaxed plan heuristic.
However, CFF does not do as well in the BT, BTC, Cube Center, and
Ring problems because there are not as many literals that will be
entailed by a belief state. CFF relies on implicitly representing belief states in terms of
the literals that are entailed by the belief state, the initial belief state, and the action history.
When there are very few literals that can be entailed by the belief state,
reasoning about the belief state requires inference about the action history.
Another possible reason CFF suffers is our
encodings. The Cube Center and Ring domains are naturally expressed
with multi-valued state features, and in our transformation to
binary state features we describe the values that must hold but also
the values that must not hold. This is difficult for CFF because
the conditional effect antecedents contain several literals and
its heuristic is restricted to considering only one such literal.
It may be that CFF is choosing the wrong literal or simply not
enough literals to get effective heuristics. However in BT and BTC
where we used only one literal in effect antecedents CFF still
performs poorly.
relaxed plan, does very well in the Rovers and
Logistics domains because it uses the highly optimized FF search
engine as well as a cheap to compute relaxed plan heuristic.
However, CFF does not do as well in the BT, BTC, Cube Center, and
Ring problems because there are not as many literals that will be
entailed by a belief state. CFF relies on implicitly representing belief states in terms of
the literals that are entailed by the belief state, the initial belief state, and the action history.
When there are very few literals that can be entailed by the belief state,
reasoning about the belief state requires inference about the action history.
Another possible reason CFF suffers is our
encodings. The Cube Center and Ring domains are naturally expressed
with multi-valued state features, and in our transformation to
binary state features we describe the values that must hold but also
the values that must not hold. This is difficult for CFF because
the conditional effect antecedents contain several literals and
its heuristic is restricted to considering only one such literal.
It may be that CFF is choosing the wrong literal or simply not
enough literals to get effective heuristics. However in BT and BTC
where we used only one literal in effect antecedents CFF still
performs poorly.