 |
Mihai Budiu -- mihaib+@cs.cmu.edu
http://www.cs.cmu.edu/~mihaib/
11 noiembrie 1998
Procesoarele RISC au apărut, în prima jumătate a anilor '80; era începutul unei revoluţii în arhitectura calculatoarelor. Ideea era că în loc de a oferi o sumedenie de operaţiuni exotice, este mai eficace pentru un procesor să ofere un set restrîns de operaţiuni, pe care le poate executa cu foarte mare viteză. Primele procesoare RISC conţineau între 25 de mii şi 40 de mii de tranzistoare.
În ziua de astăzi Pentium II conţine 15 milioane de tranzistoare! Văzut dinafară Pentium II nu este un RISC, dar arhitectura internă este de acest tip.
Întrebarea este: ce s-a întîmplat cu toate tranzistoarele astea, unde au fost ``înghiţite''? Setul de instrucţiuni al unui procesor modern este practic identic cu al unui procesor de acum 15 ani (exceptînd ornamente de genul MMX), deci funcţionalitatea oferită este neschimbată. Atunci la ce treabă au fost înhămaţi toţi tranzistorii? Răspunsul este: pentru a creşte performanţa.
Acest articol prezintă una dintre tehnicile cele mai simple la îndemîna unui proiectant pentru a creşte performanţa unui microprocesor; practic toate procesoarele fabricate în ziua de azi o folosesc. Este vorba de tehnica ``benzii de asamblare'', numită şi pipeline. Vom vedea că e vorba de o idee extrem de simplă şi eficace. Vom vedea apoi că proprietăţile unei benzi de asamblare ridică o grămadă de noi probleme, şi că implementarea tehnicii este extrem de complicată, cerînd un suport arhitectural substanţial. Vom mai vedea şi unele dintre metodele folosite pentru a rezolva problemele ivite.
Există două forţe motoare responsabile de creşterea spectaculoasă a puterii de calcul a microprocesoarelor. Una dintre aceste forţe este tehnologia de fabricaţie şi miniaturizarea. Miniaturizarea unui circuit integrat digital se măsoară în microni; distanţa care se indică este, grosolan vorbind, distanţa între două sîrme adiacente pe o suprafaţă a circuitului. Tehnologia curentă dominantă în acest an este undeva între 0.25 şi 0.35 microni. Pentru comparaţie, un fir de păr omenesc are cam 25 de microni, adică de 100 de ori mai mult!
Scăderea dimensiunilor înseamnă că distanţa dintre circuite scade, deci semnalul electric poate parcurge mai multe dintre ele în aceeaşi unitate de timp. De asemenea înseamnă că frecvenţa ceasului poate fi crescută. Ceasul unui microprocesor este echivalentul insului de la tobă de pe o galeră romană din antichitate: bate ritmul cu care se sincronizează toate părţile componente (vîslaşii). Frecvenţele atinse la ora actuală de procesoarele comerciale sunt de 600Mhz: 600 de milioane de operaţii pe secundă, pentru procesoarele Alpha 21264.
Atît despre tehnologie. A doua metodă de creştere a performanţei, care este oarecum o consecinţă indirectă a miniaturizării, este paralelismul. Dacă ai mai mulţi vîslaşi barca merge mai repede. Cu cît vîslaşii sunt mai mici, cu atît poţi pune mai mulţi în cală. (Desigur, analogia nu e perfectă, pentru că, spre deosebire de galere, pentru un microprocesor un vîslaş mai mic face la fel de multă treabă ca unul mare.)
Practic toate articolele din seria aceasta vor discuta numai despre această a doua metodă. Vom vedea că procesoarele moderne consacră o cantitate impresionantă de resurse pentru a stoarce o cît de mică îmbunătăţire a performanţei (acolo se duc cele 15 milioane de tranzistoare ale lui Pentium). În general o dublare a mărimii circuitului produce mult mai puţin decît o dublare a performanţei, dar în ziua de azi şi obţinerea cîtorva procente este o realizare meritorie.
Introducem acum cititorului prima tehnică de prelucrare paralelă, numită ``tehnica benzii de asamblare''.
Averea considerabilă a lui Henry Ford se datora, cel puţin în parte, metodei sale inovatoare de a organiza munca la fabricile sale de automobile: lucrătorii stau aşezaţi de-a lungul unei benzi, iar maşinile neterminate merg de la unul la altul. Fiecare execută asupra maşinii o singură operaţiune, după care o pasează mai departe. Asta e banda de asamblare.
Pentru a face mai evidente beneficiile tehnicii, îmi permit să o ilustrez cu încă un exemplu. Să presupunem că vreţi să investiţi într-o spălătorie/uscătorie (Nufărul?). Ce i-aţi recomanda proprietarului: să cumpere 10 maşini de spălat care centrifughează şi usucă, sau, cu aceiaşi bani, 9 maşini care spală şi 9 care usucă? Presupunem că un spălatul şi uscatul durează la fel de mult (oricare maşină am folosi), o jumătate de oră.
Răspunsul este: cu cele 9 perechi de maşini eficienţa este cu 80% mai mare! Iată de ce: să presupunem că avem un şuvoi constant de consumatori. Atunci cu maşinile de spălat putem face 10 încărcături de rufe în fiecare oră. Cu maşinile perechi însă putem face 9 încărcături la fiecare jumătate de oră, aşa cum arată tabelul 1:
|
Ei bine, exact aceeaşi idee poate fi aplicată în cazul construcţiei microprocesoarelor! În acest caz banda de asamblare se numeşte pipeline, sau conductă. De aici şi titlul articolului de faţă. Am oarecare dificultăţi în a alege o traducere rezonabilă a termenului, aşa că pe parcursul articolului voi folosi variaţi termeni, incluzînd pe cel de ``ţeavă''.
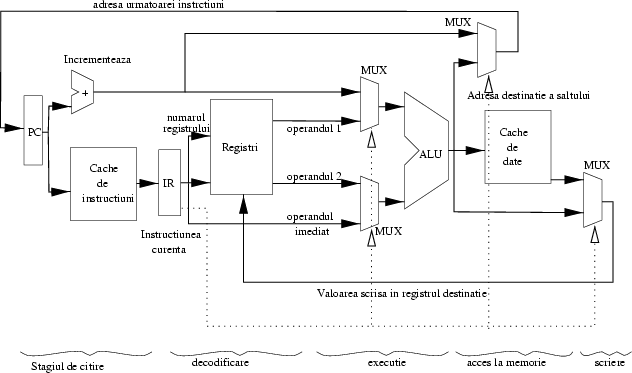
Cum se aplică deci conceptul în cazul microprocesoarelor? Care e treaba unui microprocesor? Să execute, una cîte una, instrucţiunile programelor scrise de utilizatori. Dar execuţia unei instrucţiuni se poate descrie ca o serie de paşi succesivi; ceva de genul: adu instrucţiunea din memorie, uită-te ce fel de instrucţiune este (o operaţie aritmetică/logică, un apel de procedură, un salt, etc.), decide care date trebuie procesate (care sunt regiştrii1 care conţin acele date), extrage datele din regiştri, efectuează operaţia asupra datelor, pune rezultatul la loc unde trebuie, şi o ia de la capăt cu instrucţiunea următoare. În figura 1 avem structura unui procesor ipotetic pe care indicăm cinci stagii prin care o instrucţiune trece în prelucrare.
|
Ei bine, instrucţiunile joacă exact rolul rufelor: dacă avem în procesor cîte un circuit independent pentru fiecare din aceste numeroase sarcini, atunci putem pune aceste circuite să lucreze simultan pe instrucţiuni succesive. Astfel, în timp ce instrucţiunea 1 pune rezultatul la loc (stagiul de acces la memorie), instrucţiunea 2 operează asupra propriilor date (stagiul de execuţie), instrucţiunea 3 tocmai extrage datele (stagiul de decodificare), iar instrucţiunea 4 tocmai este adusă din memorie (stagiul de citire).
Observaţi că -- aparent -- cîştigul pe care l-am obţine transformînd procesorul într-un pipeline, este pe gratis: şi un procesor obişnuit are nevoie de toate aceste circuite, însă atunci cînd folosea unul dintre ele, celelalte erau inutile. Că lucrurile nu stau chiar aşa vom vedea în secţiunile următoare.
Cartea ``canonică'' pentru studiul arhitecturii calculatoarelor moderne este Hennessy and Patterson ``Computer Architecture -- a Quantitative Approach'', publicată de editura Morgan Kaufmann în ediţia a doua în 1995. Această carte este de fapt versiunea pentru cursuri doctorale a unei alte cărţi de aceiaşi autori. Cartea este excelent scrisă, iar capitolele 3 şi 4 sunt dedicate în întregime tehnicii de pipelining, în total 250 de pagini. Dacă subiectul vă interesează cu adevărat, vă recomand să obţineţi această carte; dacă nu, poate că articolul acesta este suficient de ilustrativ. Acest articol va discuta doar despre tehnicile elementare folosite în pipelining; despre tehnicile avansate (multiple-issue, out-of-order execution, etc.) voi scrie probabil un altul. Desenele din acest text, şi diagrama procesorului ipotetic, sunt bazate pe prezentarea din această carte.
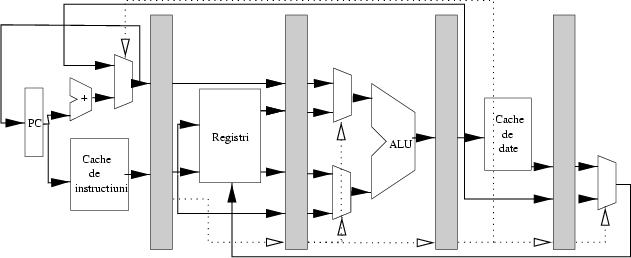
Dacă un procesor este implementat ca un pipeline, atunci între diferitele stagii ale ţevii se află nişte ``tampoane'', care izolează stagiile unul de altul. Arhitectural vorbind, tampoanele sunt de fapt tot nişte regiştri, numiţi pipeline registers. Fiecare din aceşti regiştri este comandat de ceasul microprocesorului, şi încarcă în interior toate rezultatele procesării obţinute din stagiul anterior: instrucţiunea, rezultatele parţiale, informaţii de stare, etc. Figura 2 arată segmentarea procesorului de mai sus.
 |
Vom vedea că regiştrii de separaţie au un rol important pentru blocajul ţevii în anumite circumstanţe.
Ce cîştigăm cu ajutorul ţevilor?
Păi, în primul rînd, fiecare din stagii este mai scurt decît întregul, deci se poate executa mai repede decît dacă am executa toate stagiile unul după altul. Putem deci mări frecvenţa ceasului; este exact acelaşi fenomen ca la maşinile de spălat de mai sus (încărcături la jumătate de oră în loc de o oră).
În al doilea rînd, aşa cum am văzut, acum toate stagiile sunt folosite simultan, fiecare pentru altă instrucţiune. Aceasta este o sursă de paralelism, care implică o altă creştere a performanţei.
Observaţi că succesul acestei metode se bazează pe faptul că avem de procesat un şir de instrucţiuni extrem de lung, continuu. Dacă la spălătorie vin rufe din două în două ore, atunci nu cîştigăm nimic din faptul că putem scoate o nouă serie la fiecare jumătate de oră.
Observaţi că durează o vreme de cînd prima instrucţiune intră în ţeavă pînă cînd termină execuţia: atîţia cicli de ceas cîte stagii avem. Latenţa (latency), sau durata propagării unei instrucţiuni prin pipeline, este mai mare decît în cazul unui procesor fără pipeline, pentru că am adăugat durata stocării datelor în regiştrii de separaţie. Pe de altă parte, observaţi că după ce prima instrucţiune iese din ţeavă, a doua se termină în ciclul imediat următor. Deci rata de execuţie (throughput) este de o instrucţiune pe ciclu de ceas! Distincţia între latency şi throughput este extrem de importantă.
Acest fenomen apare într-o formă exacerbată în cazul reţelelor de calculatoare, în care există doi parametri independenţi: durata propagării datelor între două calculatoare, şi viteza de transmisiune a datelor. Putem avea linii cu durată de propagare mică (de exemplu cu latenţa de 2ms), dar cu viteză mică, cum ar fi un modem de 14.4Kbps. Putem avea însă o linie cu durată de propagare extrem de mare (500ms), dar cu o viteza foarte mare, cum ar fi un canal de transmisiune prin satelit, de 2Mbps. Interesant este că în cazul reţelelor de calculatoare produsul acestor cantităţi (latenţa * rata de transmisie) este cel mai important; cu cît produsul este mai mare, cu atît susţinerea performanţei reţelei este mai greu de obţinut. Dar am divagat; sper să revin asupra acestei teme într-un alt articol. Înapoi la ţevile noastre.
Să observăm că viteza la care putem pune ceasul este limitată de cel mai lent stagiu din ţeavă. Asta pentru că toţi lucrătorii trebuie să lucreze cu ritmul celui mai încet dintre ei. Din această cauză, o împărţire a sarcinilor la 5 circuite nu garantează o creştere a vitezei de 5 ori. Să presupunem că cele 5 stagii durează 3, 3, 3, 5, respectiv 3 nanosecunde, şi că întîrzierea unui registru de separaţie este de 2 nanosecunde. Atunci circuitul fără ţeavă execută o instrucţiune la fiecare 3+3+3+5+3=17 nanosecunde, şi asta dă şi viteza ceasului. Pe de altă parte, circuitul din ``felii'' execută o instrucţiune la 5+2 nanosecunde (5 pentru stagiul cel mai lent, plus două ns pentru propagarea prin registru). Iată deci cum, deşi am împărţit sarcina la 5, din cauza imbalansului creşterea de viteză obţinută este de numai 17/7 = 2.42 ori.
Trebuie să vă temperez şi mai tare entuziasmul în ceea ce priveşte pipeline-urile: mai există o grămadă de probleme pe care le-am trecut cu vederea, dar care devin evidente de îndată ce ne aplecăm puţin asupra construcţiei.
Problema este că, foarte adesea, nu putem executa mai multe instrucţiuni consecutive chiar una după alta, pentru că anumite constrîngeri fac acest lucru imposibil. Acest gen de interferenţă între instrucţiuni consecutive se numeşte în engleză hazard. Voi folosi în româna termenul ``dependenţe'', deşi acesta nu este tocmai exact2. Despre ce fel de dependenţe este vorba?
Prima problemă care poate apărea provine din faptul că una dintre aserţiunile mele de mai sus poate fi falsă; anume aceasta: ``cînd folosea unul dintre [stagii], celelalte erau inutile''. Iată un exemplu în care acest lucru nu este adevărat: un procesor trebuie după fiecare instrucţiune să incrementeze adresa de unde se ia următoarea instrucţiune (adresa este aflată în registrul numit ``Program Counter''). Pentru că incrementarea este o operaţiune aritmetică, procesorul ar putea folosi pentru acest scop unitatea aritmetică-logică (în figura noastră am fi avut în loc de ALU şi circuitul de incrementare un singur circuit). Aici avem deci un conflict: o altă instrucţiune, aflată în stagiul de calcul ar putea dori să folosească acea unitate în acelaşi timp pentru că trebuie să adune două numere.
Astfel de ``hazards'' sunt numite ``structurale'', pentru că structura procesorului nu permite executarea anumitor tipuri de instrucţiuni simultan în stagii diferite. În exemplul nostru, instrucţiunile care nu folosesc unitatea aritmetică (de pildă o instrucţiune de salt absolut) nu cauzează nici un fel de conflicte.
Putem da şi alte exemple de dependenţe structurale: mai multe instrucţiuni vor să acceseze simultan acelaşi registru, mai multe instrucţiuni vor să acceseze memoria (de pildă o instrucţiune care vrea să-şi adune operanzii şi tocmai îi citeşte şi una care a terminat şi vrea să scrie rezultatul), sau instrucţiuni a căror execuţie durează mai mulţi cicli de ceas.
Un exemplu de ultima speţă sunt de pildă operaţiile în virgulă flotantă (adică cu numere ``reale'', nu întregi) care durează uneori zeci de cicli de ceas, iar procesorul de obicei are o singură unitate de calcul în virgulă flotantă.
Teoretic un hazard structural se poate oricînd evita duplicînd unităţile funcţionale care sunt în conflict; această soluţie nu este însă întotdeauna fezabilă. De pildă, dacă o împărţire3 durează 10 cicli, atunci ar trebui să avem 10 împărţitoare pentru a permite execuţia a 10 împărţiri succesive.
Tot pentru a evita dependenţele structurale procesoarele moderne au, aşa cum arătam în figură, două cache-uri L14 separate: unul pentru instrucţiuni (I-cache) şi unul pentru date (D-cache): în acest fel se poate citi o instrucţiune simultan cu scrierea rezultatelor alteia.
Vom vedea un pic mai jos cum rezolvă un procesor astfel de dependenţe.
O dependenţă mult mai subtilă este cea a datelor. Să presupunem că avem un program cu două instrucţiuni consecutive: una care scrie numărul 2 în registrul 3, iar următoarea care adaugă valoarea 5 acelui registru.
În tabelul 2 vedem cum progresează aceste instrucţiuni într-o ţeavă ipotetică care seamănă cu cea descrisă mai sus. Am mai pus nişte instrucţiuni noop, care nu fac nimic, în jur, pentru a ilustra mai bine
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Diagrama din tabelul 2 este tipică pentru a descrie evoluţia datelor într-un pipeline. Programul este scris pe verticală, ceasul este marcat pe orizontală. Starea ţevii poate fi citită pe verticală, de sus în jos. Căsuţa de la instrucţiunea 1 şi ceasul 3 arată în care dintre fazele ţevii se află acea instrucţiune la momentul 3, în cazul nostru în stagiul de acces la memorie (M).
Care e problema? Problema este că instrucţiunea de scriere pune datele în registrul 3 abia cînd atinge ultimul stagiu din ţeavă. Pe de altă parte, instrucţiunea de acumulare citeşte valoarea registrului 3 atunci cînd este în faza de decodificare. Dar datorită suprapunerilor, decodificarea instrucţiunii de acumulare se face la momentul 3, iar scrierea la momentul 5! Din cauza suprapunerii, în execuţie am inversat ordinea în timp în care se petrec două operaţiuni. Dacă nu facem nimic, rezultatul final va fi desigur greşit, pentru că acumularea nu vede efectul scrierii.
Înainte de a vedea ce e de făcut să inspectăm o altă dificultate care poate apărea.
Un tip special de dependenţe este cauzat de instrucţiunile de salt. O instrucţiune de salt indică o întrerupere în fluxul normal al programului. Neplăcerea apare din faptul că execuţia instrucţiunii de salt se termină destul de tîrziu, abia cînd instrucţiunea a calculat adresa finală de destinaţie. Dar între timp în ţeavă au intrat o grămadă de instrucţiuni, toate cele care urmau imediat. Evident, acestea nu trebuie executate (sau vor fi executate dacă saltul este condiţionat de o condiţie care este falsă).
Astfel de dependenţe se numesc ``dependenţe de control'', din cauză că sunt produse de modificări în ``controlul'' (ordinea de execuţie) a programului.
Voi consacra un articol întreg acestui tip de dependenţe, pentru că efectul lor este catastrofal asupra performanţei, şi pentru că sunt extrem de greu de reparat fără a pierde toate avantajele unui pipeline. Impactul salturilor este extrem de important din două motive:
Să estimăm costul unei astfel de situaţii pentru procesorul nostru de mai sus, cu întîrzieri de 3, 3, 3, 5, 3 nanosecunde. Atunci procesorul va executa 7 instrucţiuni fiecare la cîte un ciclu, după care timp de 4 cicli va umple din nou ţeava golită de un salt. Asta înseamnă 7*6 + 4*6 = 66 cicli pentru 7 instrucţiuni, adică 66/7 = 9.42ns/instrucţiune în medie. Creşterea de performanţă a procesorului faţă de modelul fără ţeavă este acum de 17/9.42 = 1.8 ori. Şi încă am presupus că celelalte feluri de dependenţe nu cauzează nici o întîrziere!
Mai avem de-a face cu o ultimă neplăcere, care este mult mai greu de rezolvat decît cele indicate anterior, şi despre care nici nu vom vorbi prea mult în acest articol.
Cînd anumite condiţii excepţionale se ivesc, procesorul trebuie să întrerupă complet fluxul execuţiei, să execute o rutină specială, iar apoi uneori să reia programul întrerupt din exact acelaşi punct. Evenimentele care cauzează această întrerupere intempestivă se numesc excepţii. Există multe feluri de excepţii, iar tratamentul lor depinde de tip. Exemple de excepţii: împărţirea prin zero, accesul la o pagină de memorie virtuală care nu se află în memoria fizică, indicaţia terminării unui transfer de către un dispozitiv periferic (ex. discul), întîlnirea unui punct de oprire (breakpoint) pus de un program de depanare, etc.
Problema cea mai mare nu este în asemenea cazuri oprirea programului şi saltul (care seamănă teribil cu o instrucţiune obişnuită de salt), ci repornirea. În momentul apariţiei unei excepţii, în ţeavă se pot afla o sumedenie de instrucţiuni, cine ştie de unde de prin memorie (poate la una dintre ele s-a ajuns printr-un salt sau chiar o altă excepţie), etc.
Dacă procesorul vrea să poată relua execuţia după o excepţie, atunci trebuie să posede o grămadă de circuite care menţin foarte multă informaţie despre întreaga stare a ţevii, pentru a permite repornirea. Un astfel de pipeline se numeşte restartable, şi este extrem de complicat.
Concluzia care se desprinde este că e mai uşor de zis decît de făcut un pipeline. Dar lupta pentru supremaţie în performanţa se dă pe viaţă şi pe moarte între marile companii (nu e o metaforă: cei mai mari concurenţi ai lui Intel, Cyrix şi AMD au trebuit să fie cumpăraţi de alte mari companii, IBM, respectiv National Semiconductors, pentru a supravieţui).
Ca atare trebuie găsite soluţii. În restul articolului vom investiga nişte soluţii pentru problema dependenţelor (dar nu şi pentru cea a excepţiilor restartabile).
O posibilă soluţie (care însă nu este folosită decît parţial) este ca în software să garantăm că astfel de lucruri nu se pot întîmpla. Compilatorul care generează cod pentru un microprocesor ar trebui să ne asigure că două instrucţiuni care se vor afla simultan în ţeavă nu vor interfera una cu alta. Compilatorul poate obţine acest efect umplînd spaţiul dintre două astfel de instrucţiuni cu instrucţiuni care nu fac nimic (no-op: no operation).
Din păcate soluţia aceasta nu este viabilă. Un motiv este că ar trebui ca compilatorul să aibă cunoştinţe intime despre arhitectura internă a ţevii (ca să ştie ce depinde de cine). Dar Pentium, Pentium Pro şi Pentium II au arhitecturi interne complet diferite, deşi implementează acelaşi set de instrucţiuni; ne-ar trebui deci un compilator diferit pentru fiecare maşina; mai mult decît atît, programele de pe una n-ar mai merge pe alta, din cauză ca altele ar fi dependenţele care trebuie evitate.
Pe de altă parte, compilatoarele moderne încearcă din răsputeri să ajute hardware-ul, fără a garanta neapărat generarea unui cod lipsit complet de dependenţe. Operaţiunea numită code scheduling (ordonarea codului) este extrem de importantă pentru a mări performanţa programelor. Practic compilatoarele încearcă să aranjeze instrucţiunile codului în aşa fel încît instrucţiuni care depind una de alta (cum sunt cele două de mai sus) sunt cît mai departe una de alta. De exemplu, dacă după cele două instrucţiuni de mai sus vine o instrucţiune care incrementează registrul 2, atunci ultimele două instrucţiuni pot fi schimbate între ele fără a modifica rezultatul programului, tocmai pentru că sunt independente. Îmi propun să discut într-un articol separat despre tehnicile de creştere a performanţei folosite de compilatoare, aşa că trec acum la prezentarea primei soluţii reale folosite pentru a rezolva problema dependenţelor.
Dacă o instrucţiune nu poate progresa în ţeavă din cauză că-i lipsesc anumite resurse (în exemplul de mai sus, registrul 3 încă nu are valoarea necesară), atunci aceste instrucţiuni sunt pur şi simplu ţinute pe loc în ţeavă în aceleaşi stagii, în timp ce cele care le preced sunt lăsate să continue. Oprirea unei instrucţiuni se numeşte blocaj, sau stall. În spatele instrucţiunii care continuă se formează un gol, numit ``bulă'' (cu b mic) (bubble). Bula este de fapt o instrucţiune noop: no operation, care nu are nici un efect.
Tabelul 3 prezintă evoluţia programului de mai sus atunci cînd apare o bulă.
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
De îndată ce instrucţiunea care avea resursele cerute îşi termină execuţia, instrucţiunile de după ele, care aveau nevoie de resurse, îşi pot continua execuţia în mod obişnuit. Blocarea unei instrucţiuni în ţeavă este relativ uşor de produs: registrul de separaţie de dinaintea acelui stagiu nu mai citeşte valorile produse de stagiul anterior, ci păstrează vechiul său conţinut.
Soluţia prin care compilatorul inserează instrucţiuni inutile se numeşte statică, pentru că programul apoi rămîne neschimbat. Prin contrast, atunci cînd bulele sunt create de microprocesorul însuşi atunci cînd programul se execută, tehnica se numeşte dinamică. Observaţi că şi în acest caz programul din memorie este neschimbat: bula apare doar în ţeavă, şi apoi dispare.
Soluţia asta pare acceptabilă. Care este costul pe care trebuie să-l plătim?
În primul rînd trebuie hardware special pentru a detecta dependenţele. Asta înseamnă practic o serie de comparatoare: un comparator compară registrul în care scrie instrucţiunea care se află în stagiul 4 cu regiştrii citiţi de instrucţiunile din stagiile 3, 2. Un alt comparator se uită să vadă dacă tipurile de instrucţiuni din aceste stagii într-adevăr folosesc regiştri (de pildă o instrucţiune de salt imediat nu foloseşte nici un registru. Dacă, de pildă, instrucţiunea din stagiul 4 va scrie în registrul consumat de instrucţiunea din stagiul 2, atunci stagiul 2 este blocat, stagiile 3 şi 4 avansează, iar în stagiul 3 se formează o bulă.
Un al doilea preţ pe care-l plătim pentru blocaj este scăderea performanţei. Din cauză că instrucţiunile nu avansează şi ţeava procesează nimicuri, rata efectivă cu care instrucţiunile sunt executate scade sub una pe ciclu. Cît de mult scade, depinde de o sumedenie de factori, începînd cu calitatea compilatorului şi terminînd cu capacitatea ţevii de a evita blocajele prin următorul mijloc pe care-l analizăm, înaintarea.
În lupta lor acerbă cu nanosecundele, proiectanţii de microprocesoare au găsit încă o soluţie pentru a rezolva dependenţele. În exemplul de mai sus, o instrucţiune aflată în stagiul de decodificare avea nevoie de nişte date pe care instrucţiunea aflată în stagiul de execuţie tocmai le calculase. Cea din stagiul de decodificare însă trebuia să aştepte ca rezultatul calculelor să fie pus într-un registru, ceea ce se va întîmpla abia mai tîrziu. Ideea este atunci simplă: din moment ce tot am deja rezultatul, de ce să mai aştept să fie scris în registru şi apoi să-l iau din nou? Ce-ar fi dacă producătorul ar trimite rezultatul pe o scurtătură direct la consumator?
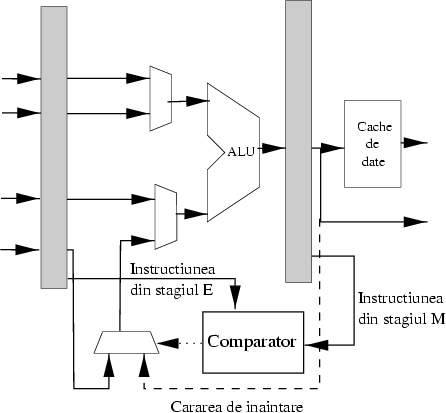
Această tehnică se numeşte ``înaintare'' (forwarding), deşi strict vorbind este o ``înapoiere'', pentru că datele sunt trimise înapoi în ţeavă, de la producător la consumator. Asta permite instrucţiunii din stagiul de decodificare să-şi continue execuţia netulburată, fără a mai fi nevoie de introducerea unei bule. Înaintarea este ilustrată în figura 3
 |
Soluţia este clar preferabilă, pentru că viteza de execuţie rămîne aceeaşi, o instrucţiune pe ciclu. Costul plătit este însă în hardware: pe lîngă circuitele prezente în cazul blocării, înaintarea are nevoie de o mulţime de trasee speciale şi circuite de selecţie (multiplexoare) pentru a trimite datele pe scurtături. Dar budgetul în tranzistoare al proiectanţilor este atît de mare încît nu se dau în lături de la aşa ceva.
Procesoarele reale folosesc deci o mixtură a celor trei tehnici prezentate anterior; nu orice se poate rezolva cu înaintare, aşa că blocajul este practic întotdeauna necesar. (Un exemplu ar fi o instrucţiune care termină de calculat un rezultat abia în stagiul 4, dar care este consumat de instrucţiunea următoare în stagiul 2. În momentul în care a doua instrucţiune vrea valoarea, ea nici nu există, deci înaintarea nu este de nici un folos., deci trebuie folosit un blocaj.)
Încheiem aici incursiunea noastră în arhitectura procesoarelor-ţeavă. În comparaţie cu alte tehnici, pe care sperăm că le vom putea prezenta în articole ulterioare, pipelining-ul este pînă la urmă o metodă destul de simplă şi cu o eficacitate imediată. În procesoarele moderne nu numai fazele de execuţie ale unei instrucţiuni sunt ``pipelined'', ci şi operaţiile aritmetice; de pildă unele unităţi aritmetice calculează o înmulţire pe 32 de biţi în 5-6 cicli de ceas, dar pentru că înmulţitorul este pipelined, el poate accepta o nouă pereche de operanzi la fiecare ciclu, şi poate produce rezultate cu aceeaşi frecvenţă.
Procesoarele moderne folosesc un întreg arsenal de alte tehnici, extrem de sofisticate, dintre care enumerăm aici:
Dacă vrem să rezumăm învăţămintele acestui text într-o frază putem spune aşa: atunci cînd ai destulă mînă de lucru şi multe activităţi de făcut, e foarte economic să organizezi munca într-o bandă de asamblare; specializarea fiecărui lucrător garantează eficacitate sporită în muncă, iar durata medie de producere a unui rezultat este egală cu lungimea activităţii celui mai lent dintre lucrători.
Gata cu distracţia, acum la treabă. Fiecare să-şi reia locul în ţeavă!