 The Personal Exploration Rover
The Personal Exploration Rover [ Overview | Exhibits | Research | Gallery | Downloads ]
About Us FAQ Links
The Personal Exploration Rover While the exhibit is idle, the kiosk cycles through five attract loop screens that give an overview of the interaction.
 |
 |
 |
 |
 |
When the visitor presses the button on the kiosk, the rover begins to build a 360 degree panoramic image of its surroundings. As the rover takes the pictures for the panorama, they are pieced together on screen.

The first step in designing the mission is to select a target rock from the panorama. This identifies the angle to the target.

The second step is to specify the distance to the target by clicking on the target location and the rover's location on the satellite map.

Then the mission designer uploads the mission to the rover.

Visitors can watch as the rover executes the mission in the yard, and they can see a rover's eye view of the mission on the kiosk screen. After the rover turns and drives the specified angle and distance, it demonstrates autonomy by scanning to locate the target and adjusting its position if necessary. If the target is not within range, the visitor gets to try again. If the target can be located, the rover carefully approaches it. The rover analyzes the target by illuminating it with an ultraviolet light. The results are returned to the "mission scientist" for analysis.


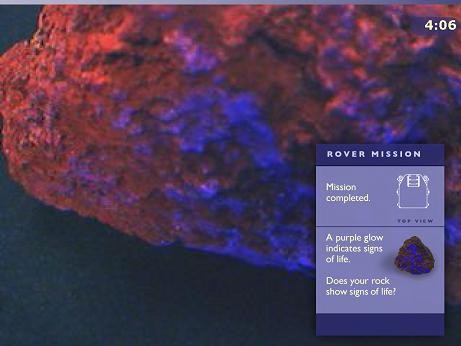
After the mission is completed, a countdown signals the start of the next mission.
