Home
Research
Principles
Motor Control
Robotics
* Projects
Publications
Students
Teaching
 |
Projects
|
Correct-by-Design Control Software Synthesis for Highly Dynamic Systems
(2013 - present)
This NSF CPS Frontiers project addresses highly dynamic Cyber-Physical Systems (CPSs), understood as systems where a computing delay of a few milliseconds or an incorrectly computed response to a disturbance can lead to catastrophic consequences. The goal of the project is to provide a methodology that allows for complex and dynamic CPSs to meet real-world requirements in an efficient and robust way through the formal synthesis of control software. The project is a larger collaboration with teams from several universities. More details can be found at www.dynamiccps.org
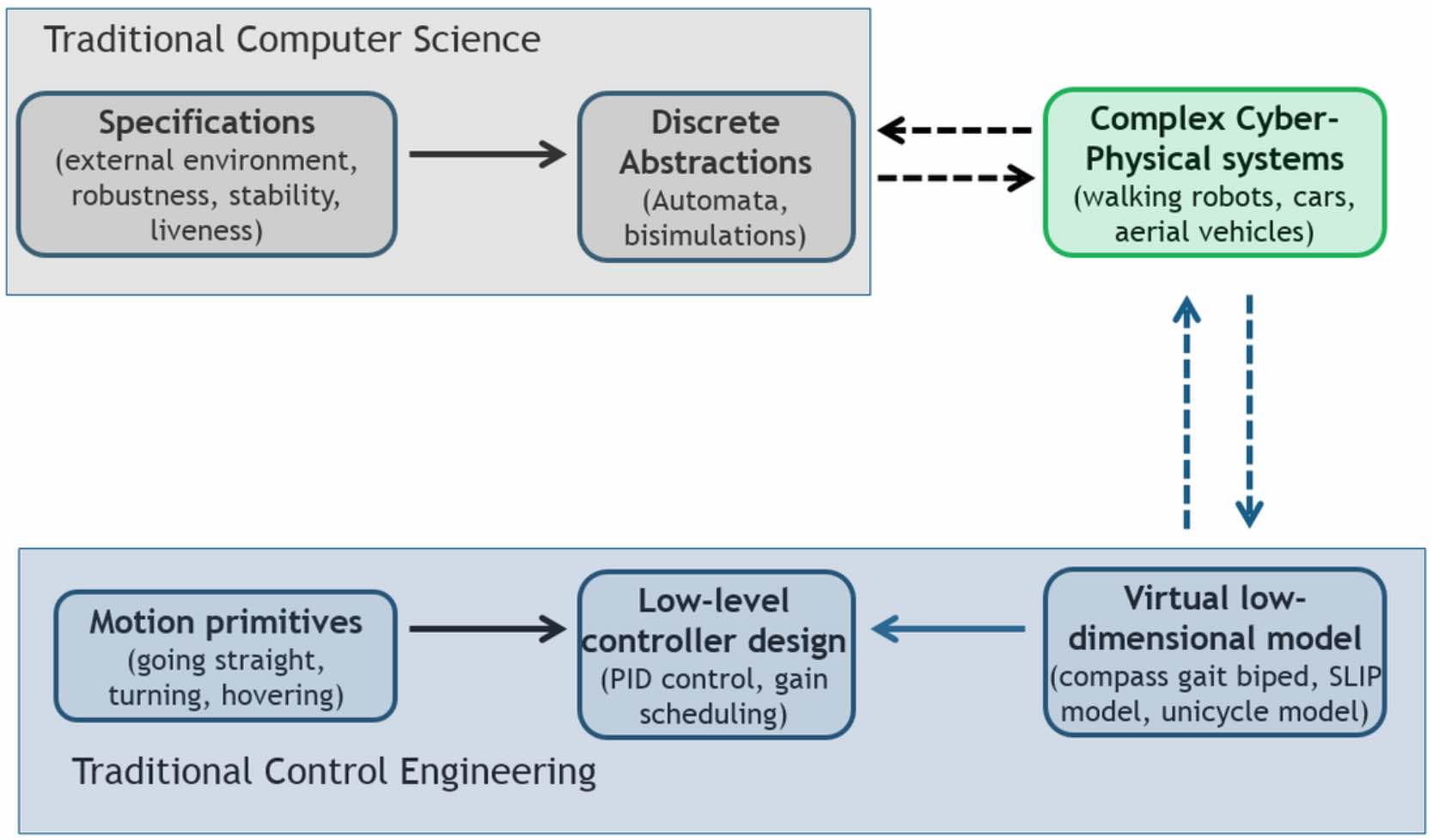 |
Figure 1
Control of Powered Segmented Legs for Humanoid and
Rehabilitation Robotics based on Neuromechanical Models of Human
Locomotion
(2012 - present)
The project goal is to transfer biomechanical design and control principles to the design and control of powered robotic legs. Leg control is crucial to the functional dexterity of legged systems from humanoid to rehabilitation robotics. We seek to develop a control approach to robotic legs that based on local reflex-control strategies of human locomotion, and to verify and demonstrate this approach with a robotic leg testbed that can rigorously characterize proposed leg designs and controls (Figure 2). The project is funded by the National Center for Medical Rehabilitation Research of the NIH Eunice Kennedy Shriver National Institute Of Child Health & Human Development.
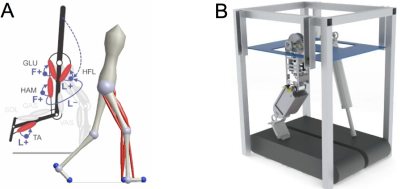 |
Figure 2
Efficient, Agile and Robust 3D Bipedal Walking and Running
(2011 - present)
The project goal is to develop bipedal robots that navigate
natural, uneven terrain with agility, speed and robustness to
disturbances. This project is a collaboration with the groups of Jonathan
Hurst (Oregon State University) and Jessy
Grizzle (University of Michigan). We combine our individual
expertise to follow a reproducible path from principled models of
legged locomotion to robotic implementation, feedback control, and
experimental verification (Figure 3). The project is funded by the
DARPA
Maximum Mobility and Manipulation Program.
 |
Figure 3
For details on the current state of the bipedal robots, visit the
ATRIAS
project page of J Hurst's Dynamic Robotics Laboratory at
Oregon State University.
Unified Model and Robotic Implementation of Bio-Inspired Walking
and Running
(2011 - present)
The project's research goals are to develop and implement a
biomechanically relevant, unified theory of legged dynamics that
spans walking and running, and to demonstrate this theory on a
bipedal robot. This project is a collaboration with the group of Jonathan
Hurst (Oregon State University). This research will further
principled models OF legged locomotion with human-like leg
dynamics, seek general insights into the manipulation of cyclic
hybrid dynamic systems for achieving different goal behaviors, and
verify and demonstrate this new scientific understanding with a
bipedal robot. Behavior manipulations will be approached using the
influence of parameters on the shape of the Poincare map in these
cyclic dynamic systems (Figure 4). Experimental verification on
the robot will demonstrate and refine the theoretical progress.
The project is funded by the NSF
Dynamical Systems Program.
 |