#include <plane_polygon.h>
|
|
double | numPoints |
| | Number of points used to build the polygon.
|
| |
|
vector< vector2i > | pixelLocs |
| | Pixel locations of the points sampled from the depth image used to construct the polygon.
|
| |
|
vector< vector3f > | vertices |
| | Vertices of the polygon.
|
| |
|
vector< vector2f > | vertices2D |
| | Vertices projected onto the 2D basis vectors.
|
| |
|
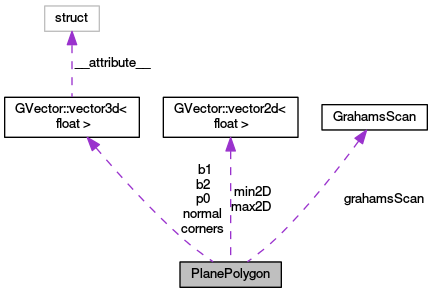
vector3f | normal |
| | Normal to the plane.
|
| |
|
vector3f | p0 |
| | Point on the plane corresponding to the centroid of the sampled points.
|
| |
|
double | offset |
| | Perpendicular offset of the plane from the origin.
|
| |
|
vector3f | b1 |
| | Basis vectors on the plane. b1 corresponds to the major axis and b2 to the minor axis.
|
| |
|
vector3f | b2 |
| |
|
double | sum_xx |
| | Coefficients of the moments of the points.
|
| |
|
double | sum_yy |
| |
|
double | sum_zz |
| |
|
double | sum_xy |
| |
|
double | sum_xz |
| |
|
double | sum_yz |
| |
|
float | width |
| | Rectangular dimensions of the polygon.
|
| |
|
float | height |
| |
|
vector2f | min2D |
| | Rectangular extents of the polygon in 2D.
|
| |
|
vector2f | max2D |
| |
|
vector3f | corners [4] |
| | Rectangular extents of the polygon in 3D.
|
| |
|
bool | validPolygon |
| | Indicates whether a valid convex plane polygon fit was copmuted or not.
|
| |
|
double | conditionNumber |
| | Ratio of the eigenvalues corresponding to the planar basis vectors.
|
| |
|
|
vector< vector2d > | normals2D |
| | Normals to the edges. normals2D[i] is normal to the edge (vertices2D[i], vertices2D[i+1])
|
| |
|
vector< vector2d > | edgeDir2D |
| | Unit vectors parallel to the edges. edgeDir2D[i] is parallel to the edge (vertices2D[i], vertices2D[i+1])
|
| |
|
vector< double > | edgeLengths |
| | Length of the edge (vertices2D[i], vertices2D[i+1])
|
| |
|
vector< double > | offsets2D |
| | Offsets to the edges such that for an interior point p, normals2D[i].dot(p)+offsets2D[i]> 0 for all i.
|
| |
|
GrahamsScan | grahamsScan |
| | Graham Scan class used to generate convex hull of the polygon.
|
| |
|
Matrix3d | m |
| | Matrices for computing optimal plane parameters.
|
| |
|
Matrix3d | eigenVectors |
| |
|
Vector3d | eigenValues |
| | Eigenvectors of the plane scatter matrix.
|
| |
|
SelfAdjointEigenSolver< Matrix3d > | solver |
| | Solver to solve for optimal plane parameters.
|
| |
A class used to reprsesent a convex plane polygon with sampled points
Definition at line 48 of file plane_polygon.h.
The documentation for this class was generated from the following files:
 1.8.6
1.8.6 
