 |
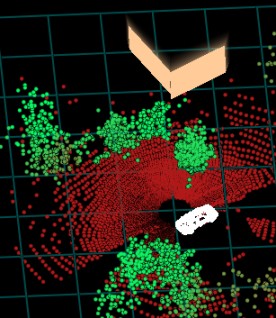
Scene understanding from 3d dataThis work is a part of the MARS (Mobile Autonomous Robot Software) 2020
program to develop technologies for object referenced navigation in
dynamic urban environments. Robust Extraction of Multiple Structures from Non-Uniformly Sampled Data |
 |
Globally consistent mapping in large cyclic environmentsWhile in the MS program, I worked on constrained optimization formulations of the mobile map-building problem, and on automatically extracting the basis constraint equations through a graph reduction of the problem. This work was in collaboration with Alonzo Kelly at the National Robotics Engineering Consortium (NREC).
Efficient Construction of Globally Consistent Ladar Maps using Pose Network Topology and Nonlinear Programming |
|
|
This page is incomplete. Click here for a full
listing of recent publications and preprints.