|
CGR Localization
|
|
CGR Localization
|
Helpers for integrating Eigen Quaternions with GVector classes. More...
#include "geometry.h"#include <eigen3/Eigen/Dense>#include <eigen3/Eigen/Geometry>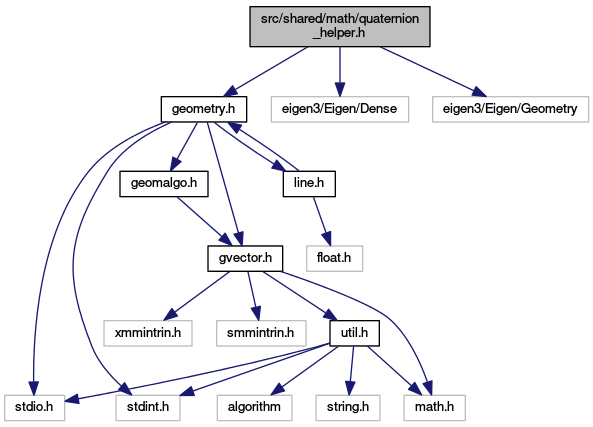

Go to the source code of this file.
Functions | |
| template<class num > | |
| GVector::vector3d< num > | GVector::quat_rotate (const Eigen::Quaternion< num > &quat, const GVector::vector3d< num > &vec) __attribute__((warn_unused_result)) |
| template<class num > | |
| void | GVector::quatToMatrix (const Eigen::Quaternion< num > &quat, GVector::matrix3d< num > &M) |
| template<class num > | |
| void | GVector::transformMatrix (const Eigen::Quaternion< num > &quat, const GVector::vector3d< num > &t, GVector::matrix3d< num > &M) |
| template<class num > | |
| Eigen::Quaternion< num > | GVector::quat_construct (const GVector::vector3d< num > &axis, const num angle) |
| template<class num > | |
| Eigen::Quaternion< num > | GVector::randRot (const num max_angle, const Eigen::Quaternion< num > &angle) |
| Generates a random rotation quaternion which rotates by a specified max angle, drawn from a Gaussian dsitribution or rotation angles. | |
| template<class num > | |
| Eigen::Quaternion< num > | GVector::randRot (const num &max_angle) |
| Generates a random rotation quaternion which rotates by a specified max angle, drawn from a Gaussian dsitribution or rotation angles. | |
Helpers for integrating Eigen Quaternions with GVector classes.
Definition in file quaternion_helper.h.
 1.8.6
1.8.6 
