Software¶
NAO comes with:
- Embedded Software, running on the motherboard located in the head of NAO, allowing autonomous behaviors.
- Desktop software, running on your computer, allowing creation of new behaviors, remote control and simulations.
- Tools for programmers, allowing remote control of the robot and also the expansion of its capabilities.

Embedded Software¶

OpenNAO is an embedded GNU/Linux distribution based on Gentoo, specifically developed to fit the NAO robot needs.
NAOqi is the main software that runs on the robot and controls it. Copies of NAOqi also run on your computer in order to let you test your behaviors on virtual robots.
Desktop software¶
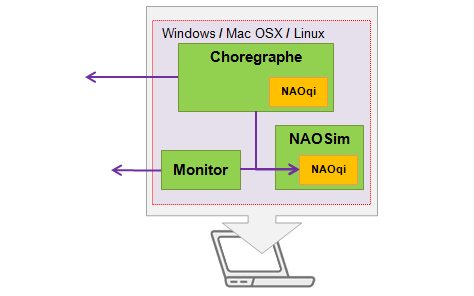
Choregraphe is a visual programming language. It allows you to: create animations and behaviors for your NAO, test them on a simulated robot before trying them with your real NAO, and also monitor and control NAO.
Monitor is dedicated to give you an elementary feedback from your robot and a simple access to its camera settings.
NAOsim is a simulator where you can test NAO behaviors and your algorithms in a virtual world. You can modify the environment by inserting and modifying objects of various shapes.
Tools for programmers¶
Create your own code, using:
- Choreographe as a visual programming language and/or,
- one of the available SDKs.
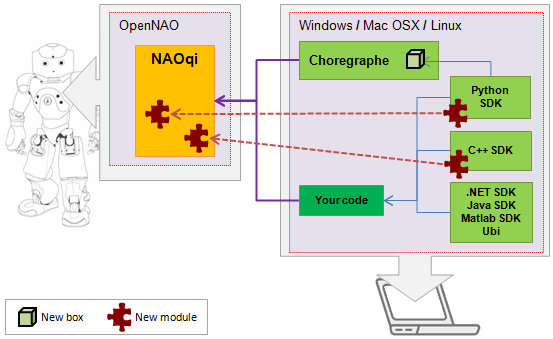
Depending on the chosen language, programmer is able to:
- create a code remotely controlling the robot (all SDKs),
- create new NAOqi modules and upload them on the robot (C++, Python),
- create code to enrich Choregraphe box library (Python).