ALRedBallDetection¶
Overview | API
See also
What it does¶
ALRedBallDetection is a module that provides a fast vision based red ball detector.
How it works¶
ALRedBallDetection is based on a fast search of a set of pixel that meet two requirements:
- the set of pixels defines a circular shape,
- the set of pixels can all be considered as red.
When a set of pixels is found on the current image, the ALMemory key redBallDetected is updated.
This key is organized as follows:
[
TimeStamp,
BallInfo,
CameraInfo
]
TimeStamp: this field is the time stamp of the image that was used to perform the detection.
TimeStamp [
TimeStamp_Seconds,
Timestamp_Microseconds
]
BallInfo
BallInfo [
centerX,
centerY,
sizeX,
sizeY
]
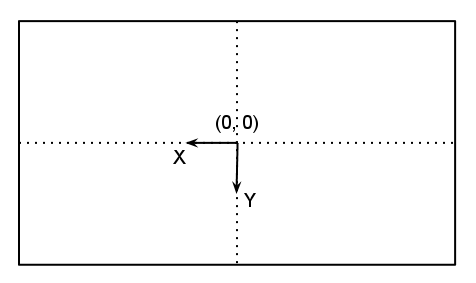
- centerX and centerY are the angular coordinates of the center of the ball in angles (radians).
- sizeX and sizeY are the ball “horizontal and vertical radius” in angles (radians).
The origin of the angles is the middle of the image. centerX corresponds to the direct (counter-clockwise) rotation along the Z axis, and centerY corresponds to the direct rotation along the Y axis, as in the image below:
CameraInfo: describes the 6D position of the camera at the time the image was taken, in Nao Space.
Performances and Limitations¶
The detection is limited to objects that are approximatively red and circular. Balls of other colors cannot be detected.
Getting started¶
The easiest way to get started with ALRedBallDetection is to use the Walk Tracker Choregraphe Box and to set the type of object to be tracked as “Red ball”.