Camera Viewer Tutorial¶
Let’s consider this use case: you are writing a module that makes your robot find the position of the ball on the football field. Unfortunately, something seems to go wrong when the robot tries to visually locate some marks around it.
You can use Monitor’s camera viewer that will to see through the robot’s eyes. You can also configure the camera settings from there (brightness, contrast...), and finally understand why everything seems to go wrong.
To start, please launch Monitor and start the Camera Viewer plugin. See the Monitor Getting Started section to learn how.
As your plugin is being loaded, you will be requested to select the robot you want to connect using the connection widget.
When you choose your robot, the camera viewer plugin widget connects the robot and appears.
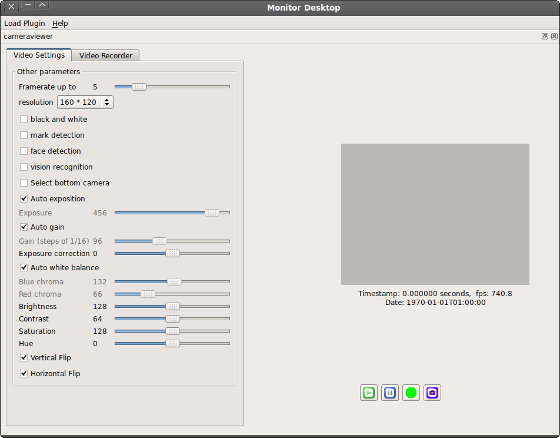
Using this widget, you can set many parameters for the camera, as described here. To start viewing what the robot sees, click on the play button located at the bottom right of the widget.
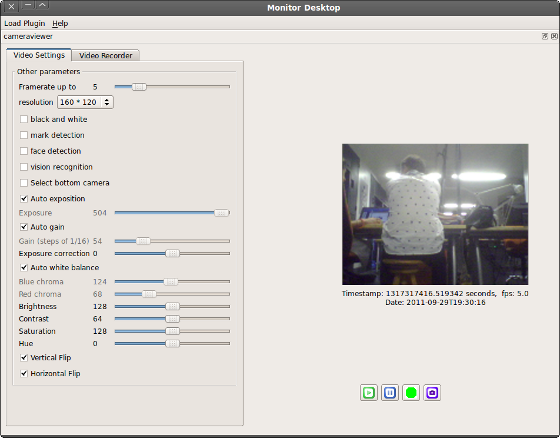
Wow! Nice shirt! Well, this is not our ball...
Seeing that, you understand that the ball, which is at your robot’s feet, cannot be seen that easily with the top camera. Using the bottom camera instead would definitely help! Simply click on Select bottom camera on the left side of the widget to switch between cameras.

Finally, you diagnosed your little camera issue, and you are back on track for real robot programming!