Fall manager¶
Overview | API
See also
What it does¶
Because NAO may fall, we taught him to stand up. But we went even further by establishing a system to detect falls: it protects with her arms before touching the ground. NAO can therefore fall, he will not hurt.
By default, the fall manager is active on NAO.
How it works¶
The basic idea is to look at both the support polygon and the Center Of Mass (COM) of NAO. If the COM is detected out of the support polygon, the fall manager process is activated.
This process has priority over all other motion tasks. The choosen strategy is composed by an arms and pelvis joint configuration to protect the robot follow by a stiffness off command to cushion the fall. The joint configuration depends on the fall angle (back, front, right or left).
A memory event called robotHasFallen is raised when the fall management process is completed.
Getting started¶
When the reflexe is active¶
The fall manager reflexe is only activated when at least one foot touch the ground (based on ALFsr).
If the robot is lift, sit or other posture than stand, the fall manager is not activated.
How to disable this reflexe¶
As this reflexe increase a lot the life time before failure of NAO, we recommand to not disable this reflex.
But as we know that in some situation, this reflex will disturbe your work, please follow these two steps to disable it.
Allow disactivation
The first step is to allow disactivation of this reflex.
With the web page
You can do it throw the NAO web page settings (NAO Web page).

if you check the box, a popUp will ask you confirmation
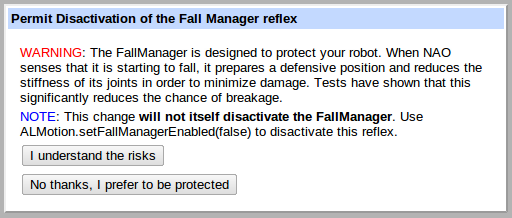
By clicking on the button : “I understand the risks”, you will allow the disactivation of the fall manager.
Programmatically
The right of disactivation of the fall manager is managed by the ALMotion preference into the robot. (/home/nao/.config/naoqi/ALMotion.xml).
So, you can edit by hand this file or use the ALPreferences API.
The name of the preferences in ALMotion.xml is : “ENABLE_DISACTIVATION_OF_FALL_MANAGER”.
And the preference file should have this form :
<Preference name="ENABLE_DISACTIVATION_OF_FALL_MANAGER" description="If true the disactivation of Fall Manager is allowed" value="true" type="bool" />
Disable the reflexe
Once, the disactivation of the fall manager is allowed, it’s possible to use the ALMotionProxy::setFallManagerEnabled method to disable the fall manager for the current naoqi launch.
Before this, you should have prepared your own defensive methods to protect from falls.
motionProxy.setFallManagerEnabled(False)
You can also use the ALMotion preference key “ENABLE_FALL_MANAGER_PROTECTION” with a value=”false” for disable at every naoqi launch the fall manager reflex.
And the preference file should have this form :
<Preference name="ENABLE_FALL_MANAGER_PROTECTION" description="If false the Fall Manager reflex is disable on this robot." value="false" type="bool" />