Behavior Manager panel¶
The Behavior Manager panel basically enables you to install, uninstall, play and stop behaviors on the robot you are connected to.
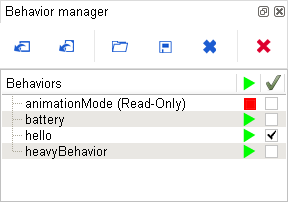
The first column corresponds to the list of the installed behaviors.
Note
You may have noticed that a behavior named animation mode is already installed on real robots which software version is equal to or higher than 1.12. It is a read-only behavior that you cannot delete or replace as it is a functionality needed by Choregraphe. If you want more information about this behavior go to section: How to use the animation mode.
The second column represents the execution status of each behavior:
| Button | Function |
|---|---|

|
The behavior is not running and can be played by clicking on this button. |

|
The behavior is loading. |

|
The behavior is running and can be stopped by clicking on this button. |

|
The behavior is unloading. |
The third column enables you to set a behavior as default. A default behavior is a behavior which is automatically played at NAO startup.
Here for example you can see that a behavior named hello is set to default. This behavior makes NAO say hello and move his arm. So each time NAO is switched on, he says hello with a movement of his arm.
See more about the available functionalities of this panel here.
Behavior Manager panel¶
Here are the actions you can make in this panel:
| Button | Function |
|---|---|

|
Install the current opened behavior on your robot. |

|
Install a behavior from your computer on your robot. |

|
Open the behavior selected in the list of installed behaviors in Choregraphe. |

|
Export the behavior selected in the list of installed behaviors from your robot to your computer. |

|
Uninstall the behavior selected in the list of installed behaviors. |

|
Stop all behaviors that are currently running on the robot. It is useful if you have executed a behavior at startup for example and you do not have control over it. |
|
|
Play or stop each behavior. This button also represents the execution status of each behavior. It can be:
|


|
This checkbox enables you to set each behavior as default. It can be:
|
Note
Name a behavior .default to set it automatically as default behavior.
Warning
You can play and set as default several behaviors simultaneously. But the behaviors needs to be compatible. For example a behavior making NAO sit down and another making him walk are not compatible. Please set the resources of your boxes to avoid conflicts between simultaneous behaviors (see How to set resources of a box).