| Automatic 3D modeling from reality | |
|
Results
| Accuracy
|
|
| Thesis Research |
Robotics Institute
|
| Daniel Huber |
Carnegie Mellon University
|
|
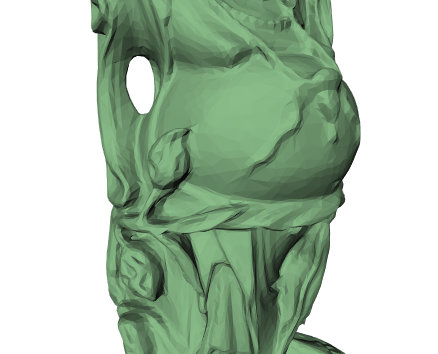
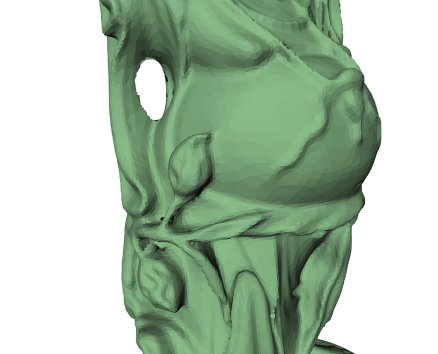
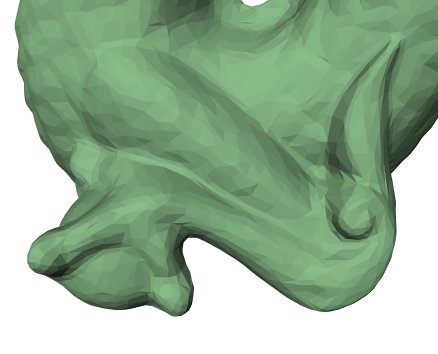
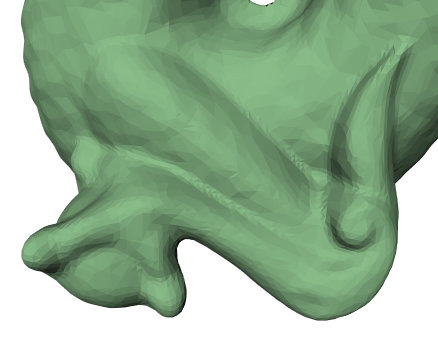
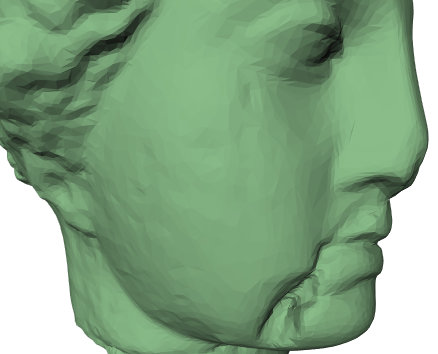
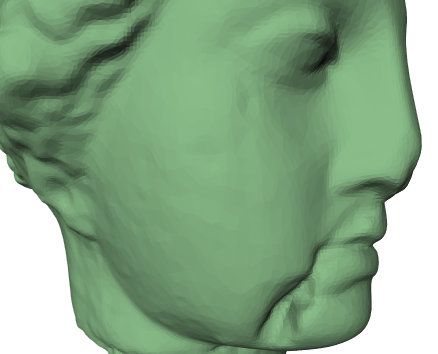
To test the geometric accuracy of the models constructed using automatic modeling, we used controlled experiments with a synthetic range sensor. The reconstructions are accurate to within 0.02% of the model size (0.04 mm for these objects). The pictures below show close-ups of three test objects and their reconstructed models. The reconstructions have a slight loss of detail when compared to the originals. The main sources of error are the sensor resolution, sensor noise, and voxelization in the surface reconstruction algorithm.
Next: Publications |
|||||||||||||||||||||||